单执行器控制
参考视频:
复位
- 当需要切换模式的时候,需要进行一次复位,在TA-Debugger中,返回主菜单=复位,发送完复位模式指令后,驱动器立刻重启,驱动器重启的时候,红灯先亮起,然后立即熄灭,接着蓝灯常亮.

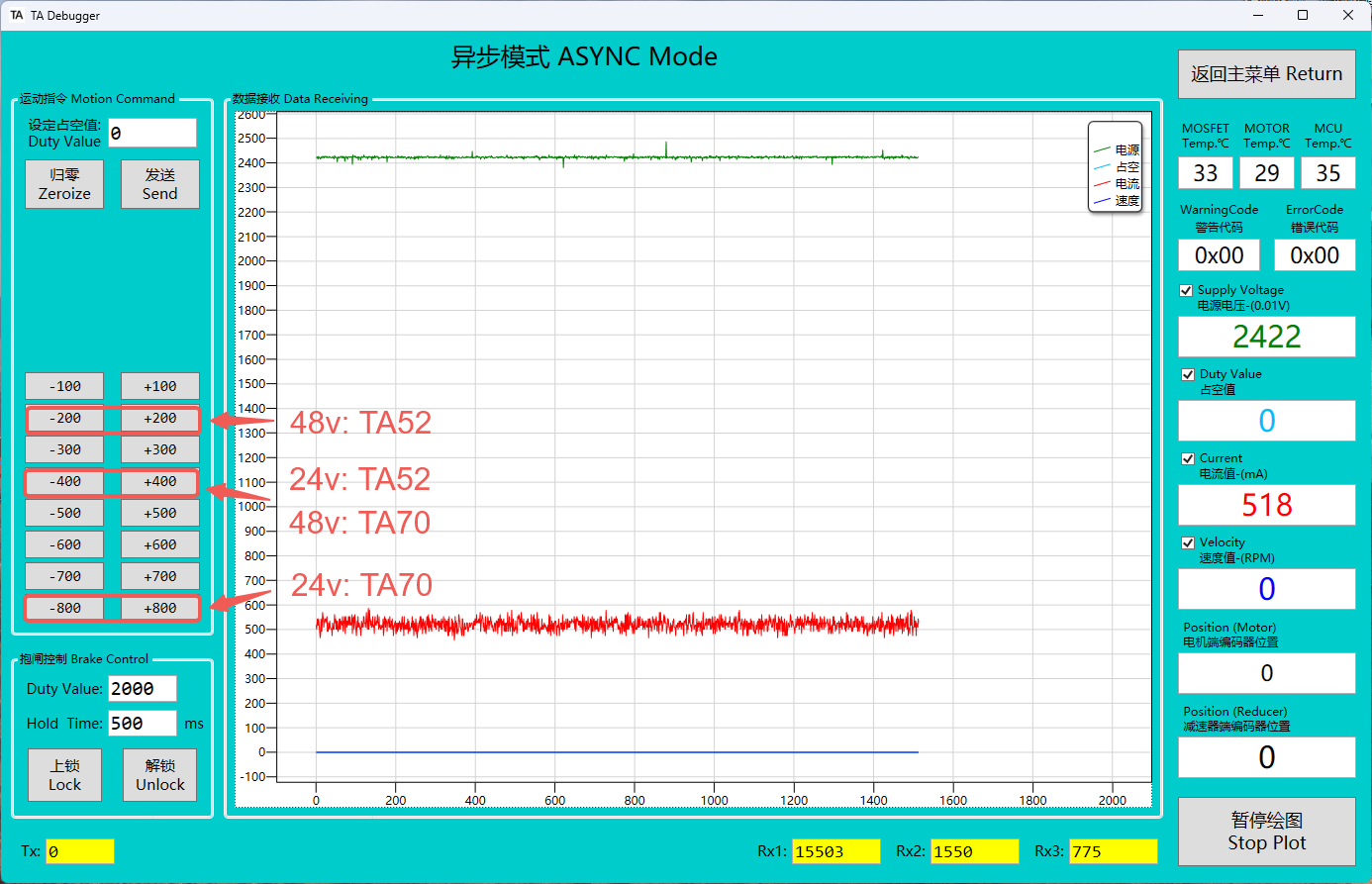
异步模式
- 异步模式用于出厂时校准电机端编码器,可使电机在无需依赖传感器的情况下进行旋转。
📌
在执行器正常的情况下,请用户尽量避免使用此模式。此模式主要为用户远程校准编码器时所需开放。
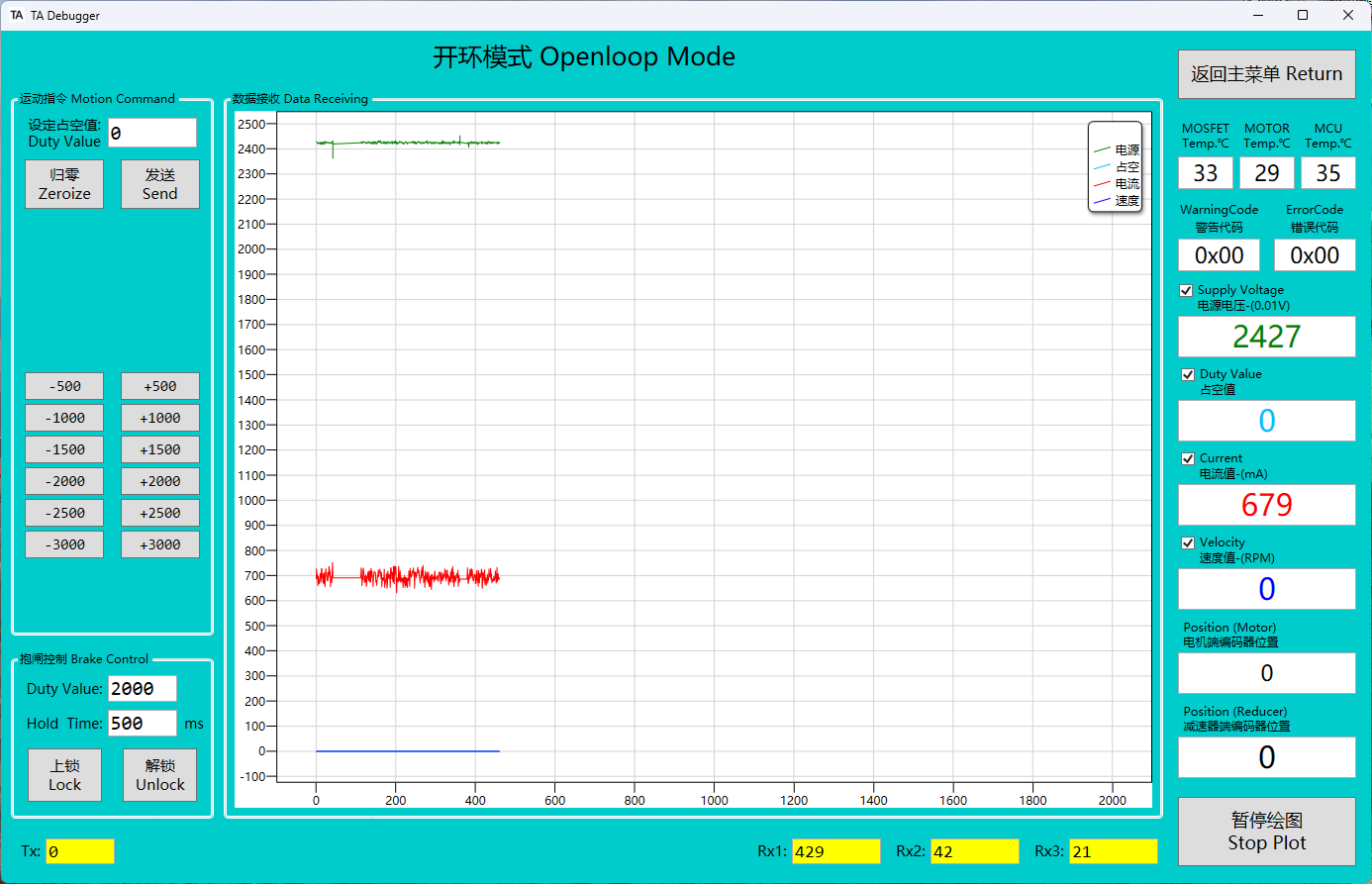
开环模式
- 开环模式是出厂时用于校准减速器端编码器用的,能够让电机进行简单的旋转
📌
在执行器正常的情况下,请用户尽量避免使用此模式。此模式主要为用户远程校准编码器时所需开放。
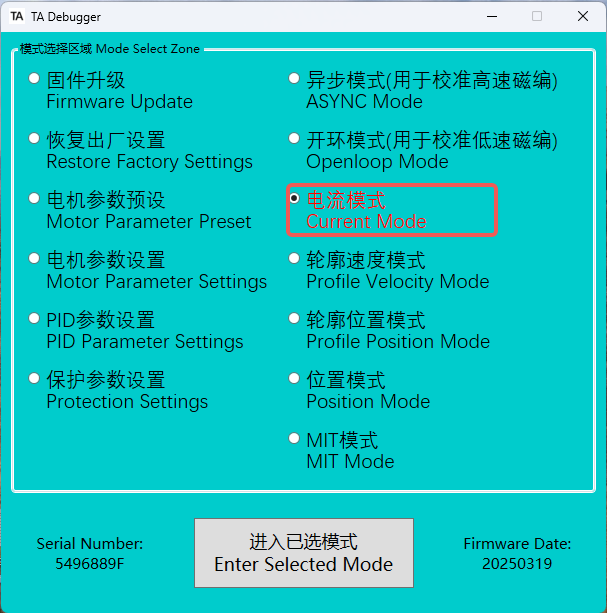
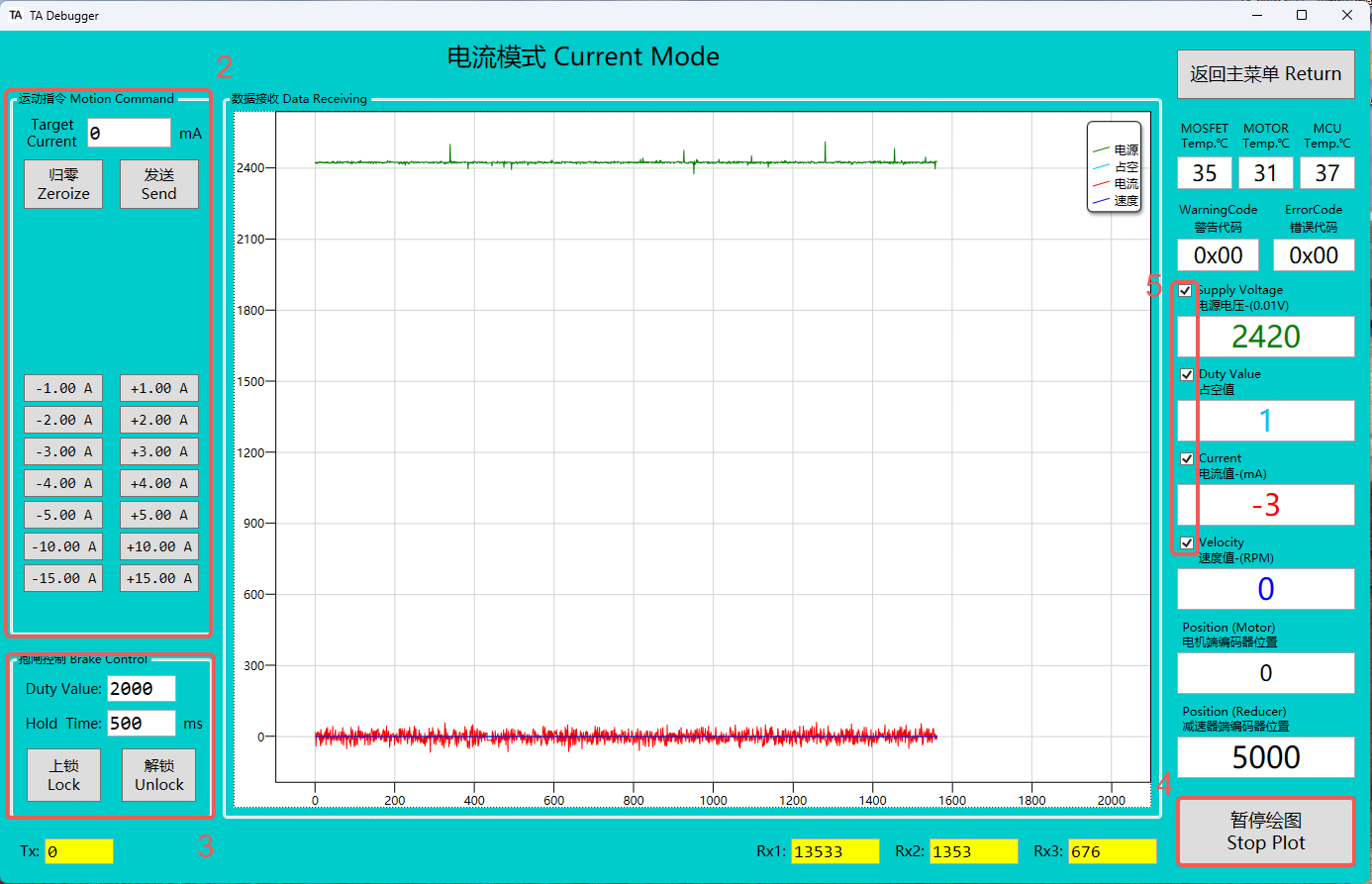
电流模式
-
进入电流模式后,LED状态指示灯由蓝边绿,同时刹车自动打开
-
此区域为电流模式的控制区域,用户可以通过按钮或者输入具体的电流值来驱动电机,在调试电流模式的时候,请从小电流逐渐往上加,否则容易产生危险
-
此区域可以手动控制刹车的上锁与解锁状态,请不要修改PWM和时间值
-
点击停止绘图,可暂停生成的实时曲线图
-
通过勾选或取消勾选可以决定是否显示对应状态的曲线图
-
如果需要改变执行器电流调节的速度,可以一次性(修改Flash内存)或实时(修改RAM内存)修改该模式下电流环pid,具体的设置方法在下文的“Control Frame”中可查询
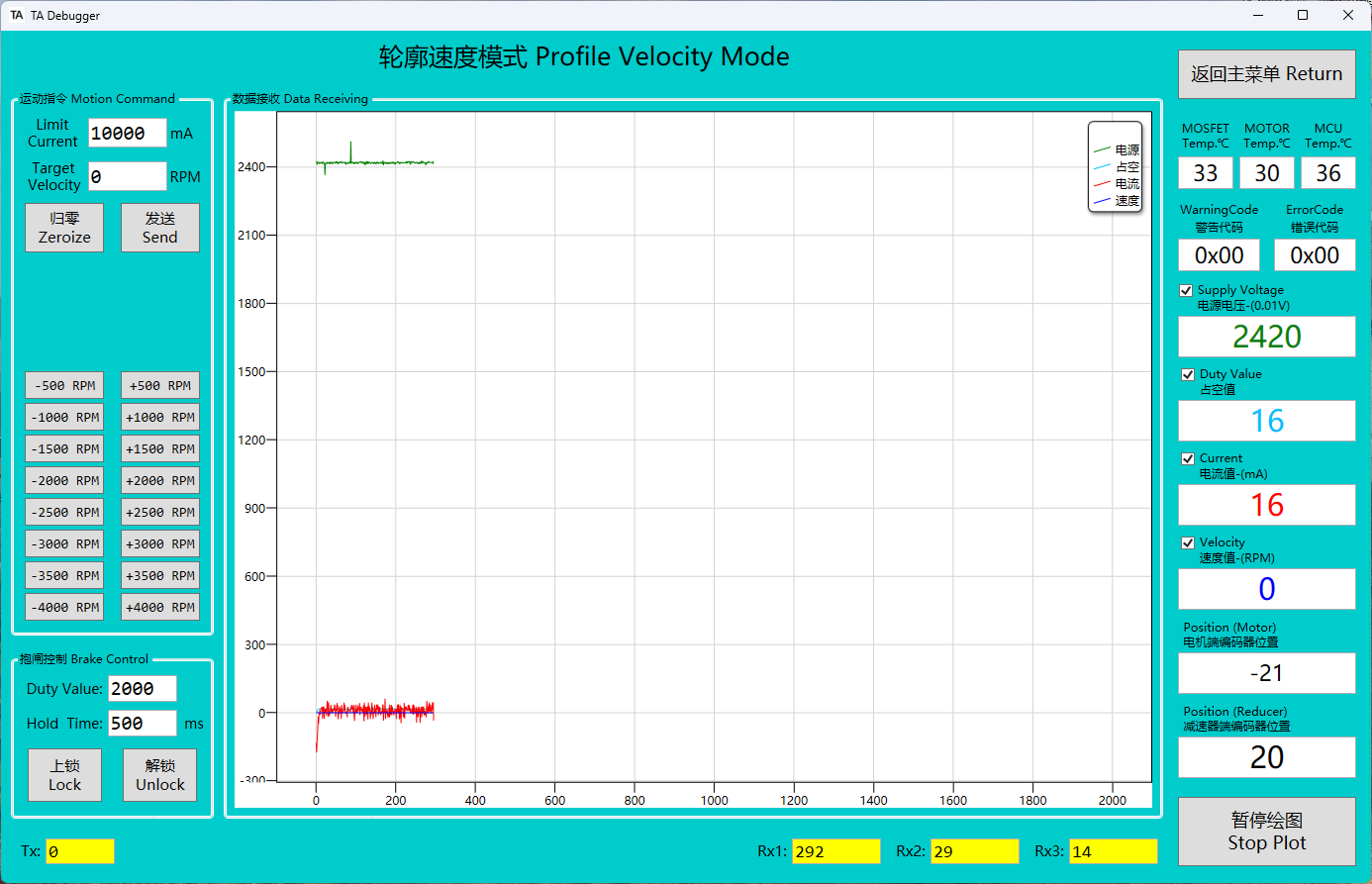
轮廓速度模式
- 进入轮廓速度模式后,LED状态指示灯由蓝变绿,同时刹车自动打开
- 可以同时对电流限制值和电机端速度进行控制。当电流限制设置过低时,可能会导致电机无法达到设定的速度,因为电流不足以提供所需的驱动力,从而限制了电机的转速输出。因此,在设定电流限制时需要确保其能够满足电机在目标速度下的负载需求,以避免出现速度无法达到预期值的情况。
- 如果要更改加速度可更改“速度模式下的加(减)速度”值,速度环pid则用于调节实际速度跟随规划的速度轨迹的效果,这些都支持一次性修改(flash)或者实时修改(RAM),具体的设置方法在下文的“Control Frame”中可查询
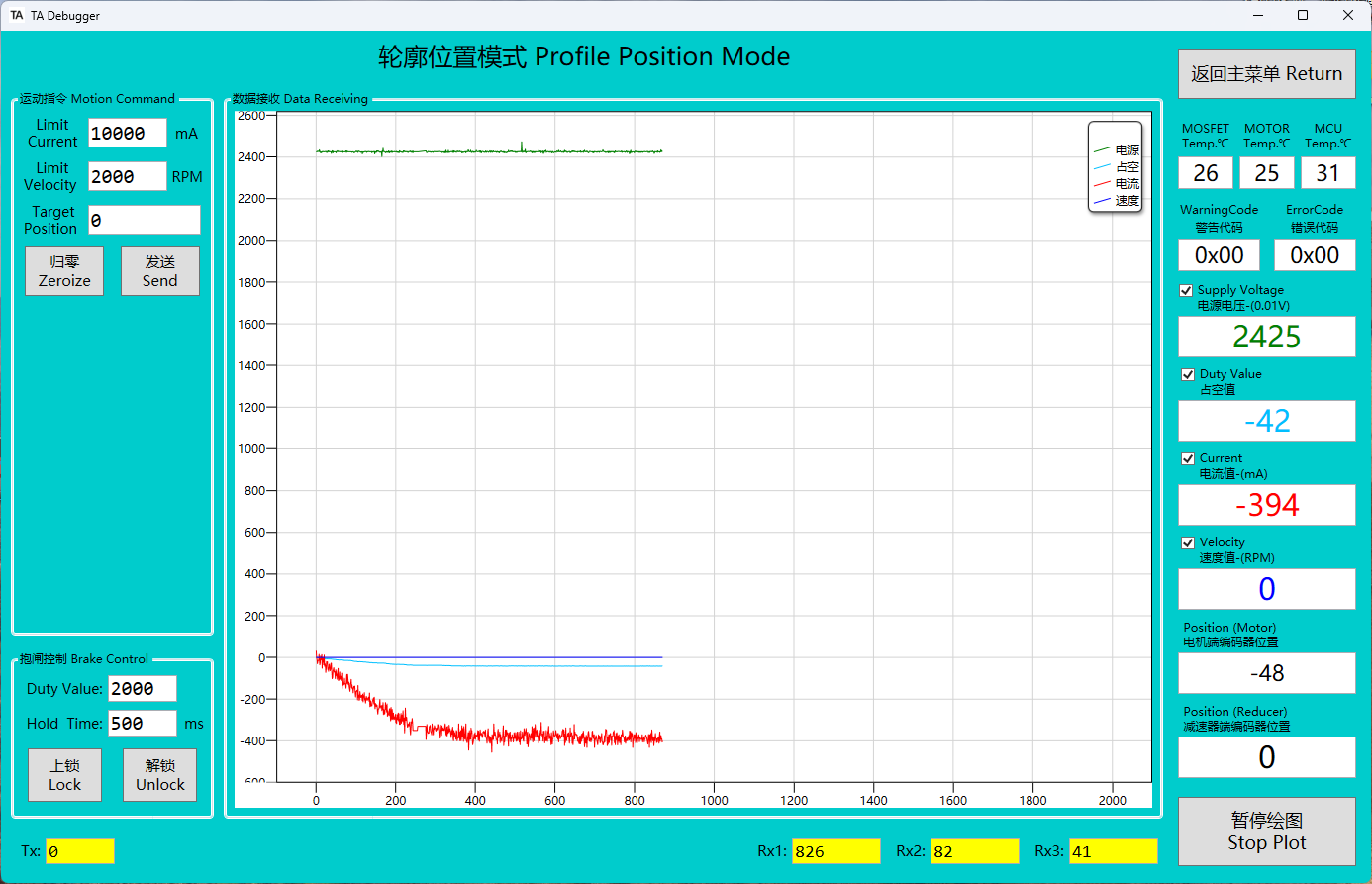
轮廓位置模式
- 轮廓位置模式内置轨迹规划功能,在上一段轨迹规划完成之前,发送的更新位置指令将被忽略。这个模式适合直接控制大角度,不能高频输入位置值。
- 进入轮廓位置模式后,LED状态指示灯由蓝变绿,同时刹车自动打开, 减速器端自动回到0点(可在电机参数设置中设置不自动回0点),退出时,抱闸会自动上锁。
- 可以同时控制电流限制、电机速度和减速器位置(可修改为电机位置)。如果电流限制过低,电机可能无法达到设定速度,因此需确保电流限制满足负载需求。
- 在该模式下,可以对加速与减速参数进行调整。该模式的加减速设置与轮廓速度模式共享一套数据结构,支持一次性修改(修改Flash内存)或者实时修改(修改RAM内存)。具体的配置方法请参考下文中的“Control Frame”部分
- 支持一次性修改(修改Flash内存)或者实时修改(修改RAM内存)该模式下的电流环,速度环和位置环的pid,具体的设置方法在下文的“Control Frame”中可查询
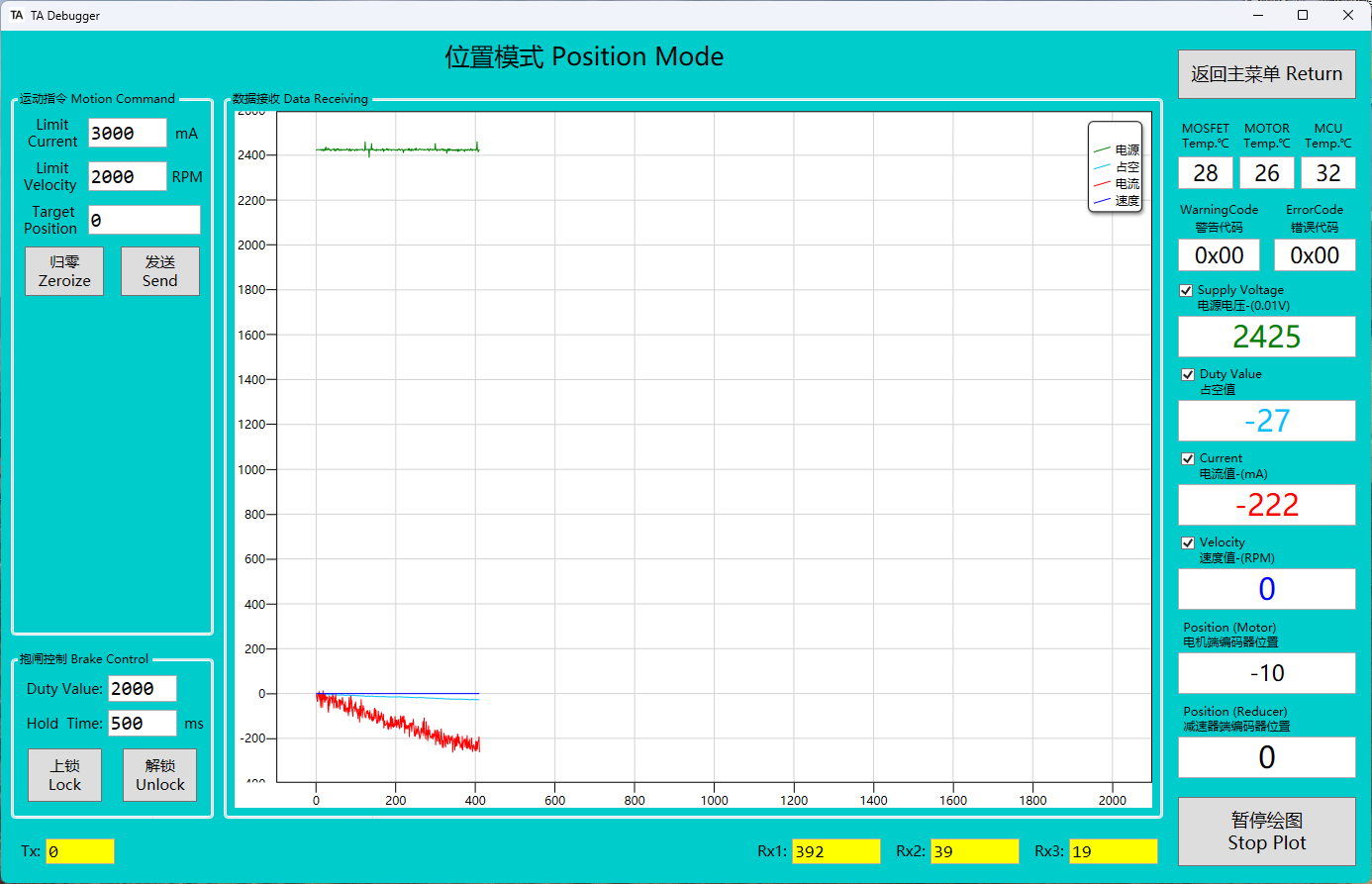
位置模式
- 此位置模式是三环架构,分别是位置环->速度环->电流环,区别于轮廓位置模式,此模式不内置轨迹规划的功能,所以允许高频更新位置。这个模式适合控制小角度变化,常用于跑轨迹。
- 进入位置模式后,LED状态指示灯从蓝变绿,刹车自动释放,减速器端自动回到0点(可在电机参数设置中关闭自动回0点功能)。退出模式时,抱闸会自动上锁。
- 可以同时控制电流限制、电机速度和减速器位置(可修改为电机位置)。如果电流限制过低,电机可能无法达到设定速度,因此需确保电流限制满足负载需求。
- 在该模式下,可以对加速与减速参数进行调整。该模式的加减速设置与轮廓速度模式共享一套数据结构,支持一次性修改(修改Flash内存)或者实时修改(修改RAM内存)。具体的配置方法请参考下文中的“Control Frame”部分
- 支持一次性修改(修改Flash内存)或者实时修改(修改RAM内存)该模式下的电流环,速度环和位置环的pid,具体的设置方法在下文的“Control Frame”中可查询
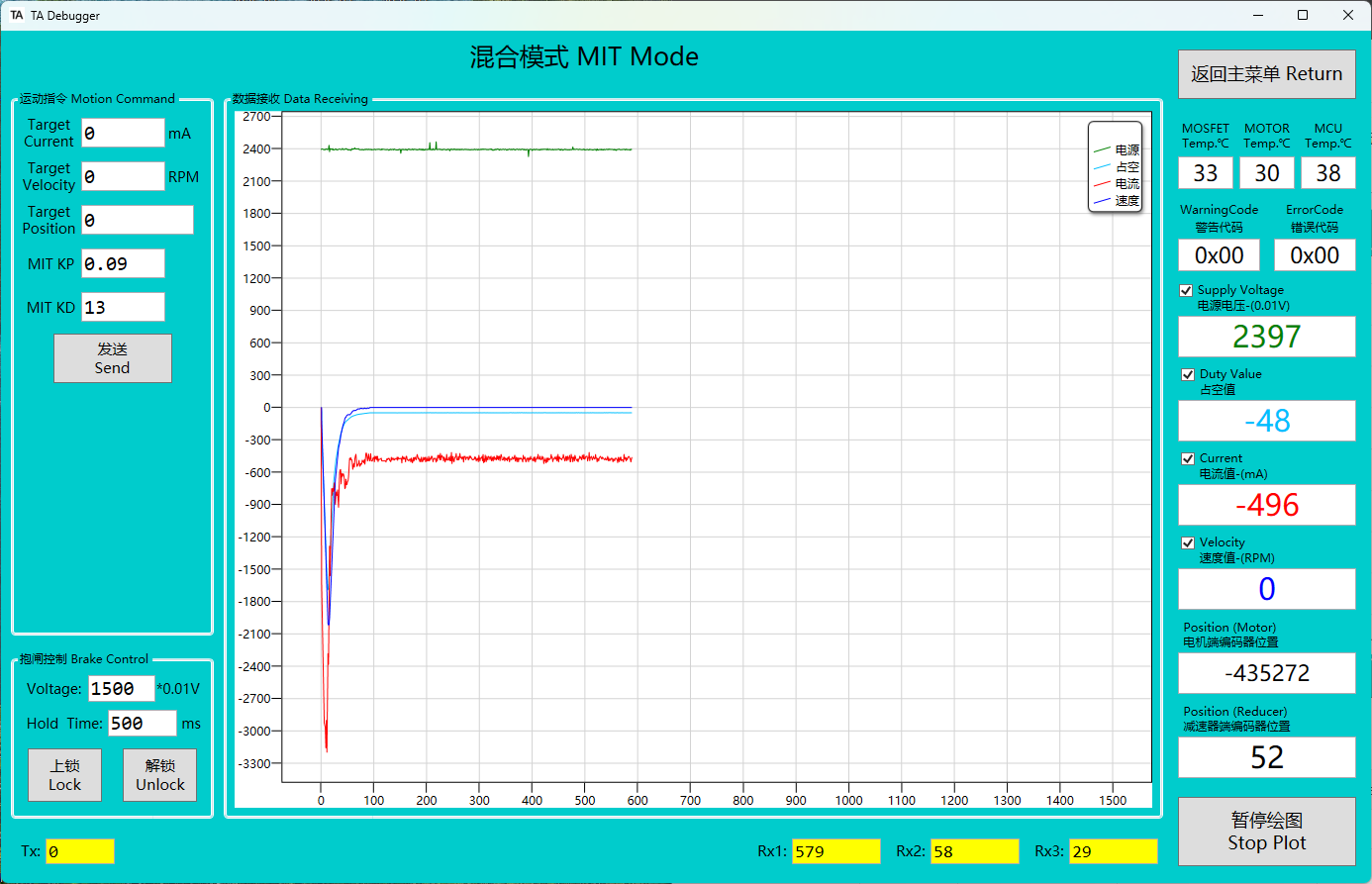
MIT模式
- 进入MIT模式后,LED状态指示灯由蓝边绿,同时刹车自动打开, 减速器端自动回到0点(可在电机参数设置中设置不自动回0点),退出时,抱闸会自动上锁。
- MIT模式是一种由麻省理工开发的专门的控制模式,主要用于精确的扭矩和电机控制应用。它允许对电机性能进行高级控制
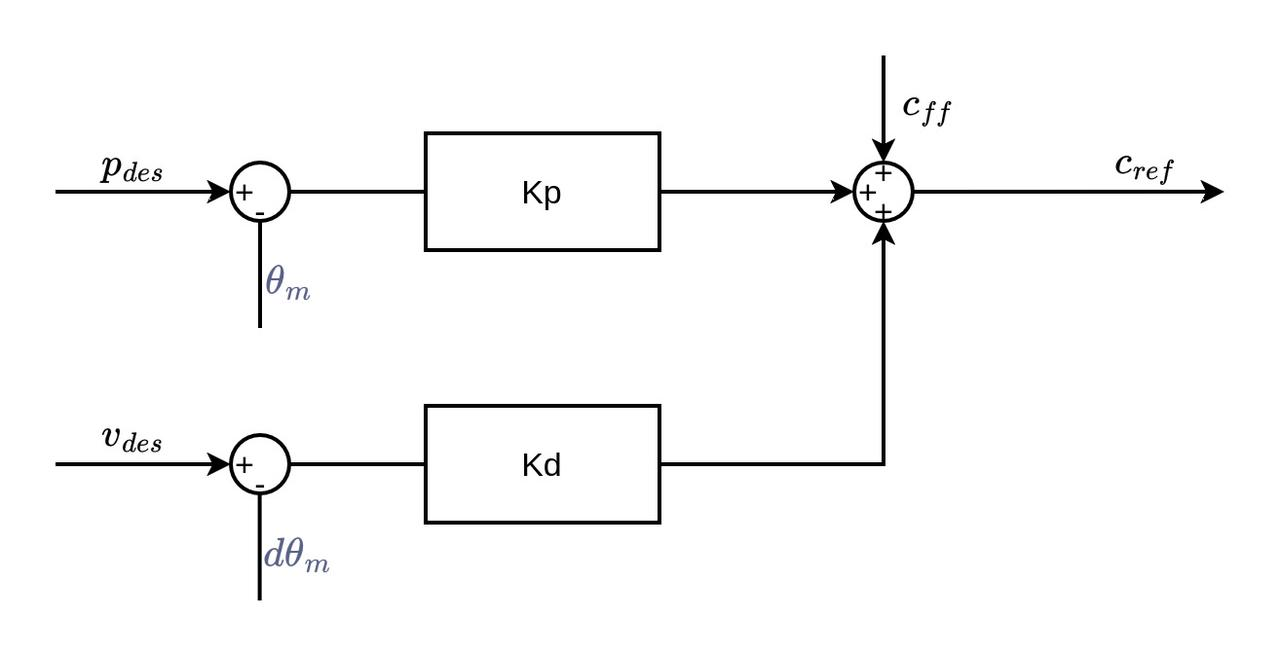
-
MIT模式下,需要分为两条CAN帧发送,一条帧为电机的电流,速度,和减速器的位置信息(可在电机参数设置中修改为电机端的位置),另一条为MIT_Kp和MIT_Kd,具体的设置方法在下文的“Control Frame”中可查询。同时它也受电机参数设置中的电流限制值影响。
-
简单的MIT控制模式例子
Set Position to 0°
Set Position to 360°
Set Velocity to 1000rpm
Set Current to 3A
current
0
0
0
3000
ma
velocity
0
0
1000
0
rpm
position
0
65536
0
0
Kp
0.09
0.09
0
0
Kd
13.1
13.1
30
0