Interface Introduction
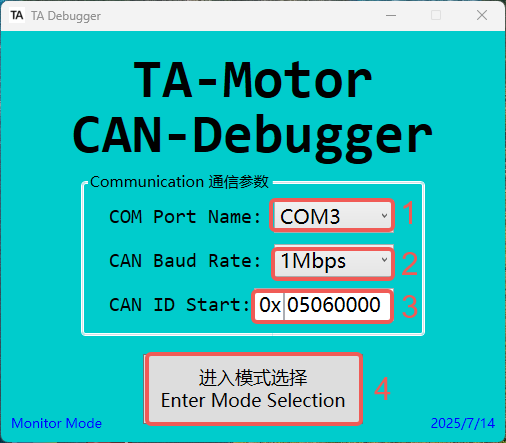
Open TA-Debugger
- Select the correct COM port.
- Select the baud rate. Currently, only 1M is available. More baud rate options will be added through firmware updates in the future.
- Select the correct CAN ID. The default CAN ID from the factory is
0x05060000. - Please enter the mode selection. The date in the bottom right corner indicates the software version date.
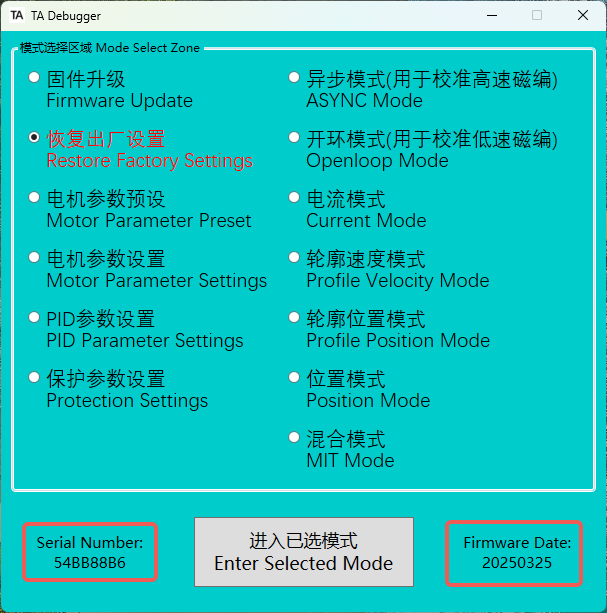
Check the Connection
- Check if the serial number and firmware version date are displayed. If displayed, communication is successful; if empty, communication has failed. Please check the wiring and ensure the power is on.
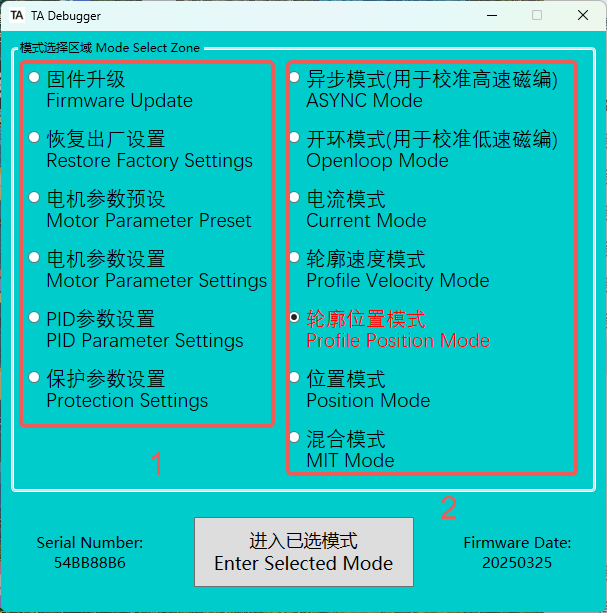
Interface Introduction
- The area on the left is the parameter configuration area. It is recommended to use this software to configure the parameters of the TA actuator, rather than using messages. This is a very reliable and efficient method.
- The area on the right is the motion control area, used for basic joint motion debugging.