TA-Debugger
更新日志:
2025年4月30日 版本:20250430
修复抱闸上锁或解锁的bug
🦄
此版本更新后,可以直接使用,无需恢复出厂设置
2025年3月28日 版本:20250325
更新固件,更新调试软件:
- 各个运动控制模式的输入值限制,可在ini文件上设置。并解决了一些交互的bug
- 关于抱闸:
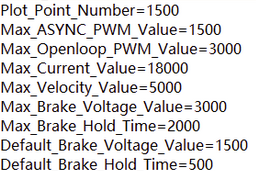
- 调试软件参数预设页面增加抱闸自动开合电压设置
- 程序内部处理抱闸,原先使用的PWM占空比的方式,本次MCU程序更新为按照当前供电电压重新计算得到准确的电压值对应的PWM,再施加给抱闸。避免抱闸在50V等高压供电下,对抱闸冲击过大,出现来回反弹的情况
- 运动控制页面,抱闸输入PWM更变为0.01V为单位的电压,值范围大致不变,比如输入2000,原意是2000的PWM,2000/4000=50%,也就是50%的占空比,新意义是20.00V,也就是20V再比如,输入1500,即15V
- 关于温度:
- 调试软件过温保护页面,放宽过温保护最大值到180
- 调试软件运动控制主页面的温度显示范围从-128~+127℃ 调整为-75 ~ +180℃,做此项改动,是为了极限测试的方便。
- 电机NTC未连接的情况下,也就是NTC电阻阻值无穷大的情况,温度显示为-65℃附近。这里是bug,原先就应该如此,但转换过程出现了意想不到的结果导致负温度变成了0,本次更新修复了这个bug
- 更改调试软件的pid参数设置中MIT参数的描述
📌
注意事项:
- 已经在臂上的电机,不方便重新标定的,需要手动去参数调试软件预设页面,将抱闸自动开合的电压值设置为1500,后续才可以正常工作。
- 自由的关节电机模组,直接恢复出厂设置,重新识别即可。
时间:2025年3月25日 版本:20250323
更新调试软件:
- 对调试软件运动控制页面进行一些整理和补充完事英文对照
- 波形图绘制,可配置刷新页面点数

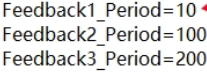
- CAN的Feedback3个周期参数,可配置返回时间
时间:2025年3月19日 版本:20250319
更新固件:
- MIT模式运行周期,从之前的10ms一次,改为2ms一次,也就是500Hz
- 为了方便同一款电机安装上不同的减速器,现在位置PID和MIT的PID,改为基于电机端编码器
- 位置P参数相比之前缩小100倍,MIT的P参数相比之前缩小100倍,后续如果从101的减速比,换到81/51/31的减速比,直接可以仅修改参数设置页面的减速比大数即可,其他地方无需改动了。
- 调试软件修改MIT页面初始化P数值从9改为0.09
📌
注意事项:
- 已经在臂上的电机或者不方便恢复出厂设置重新标定的电机,需要手动去将位置默认P参数从0.8改为0.008,MIT的P参数改为从9改为0.09
- 可以自由转动的电机直接恢复出厂设置重新标定即可。