调试软件使用指南
界面介绍
- 左边的区域为参数配置区域,推荐使用该软件而不是使用报文来配置TA执行器的参数,这是一种非常可靠且高效的方式
- 右边的区域为运动控制区域,用于基础的关节运动调试
固件升级
-
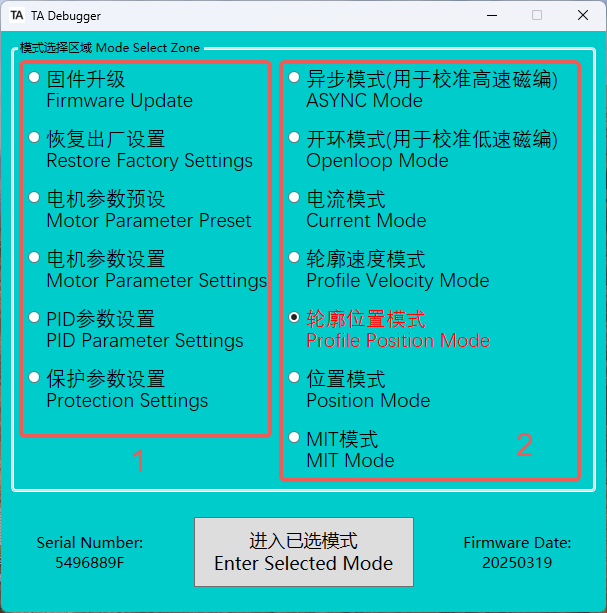
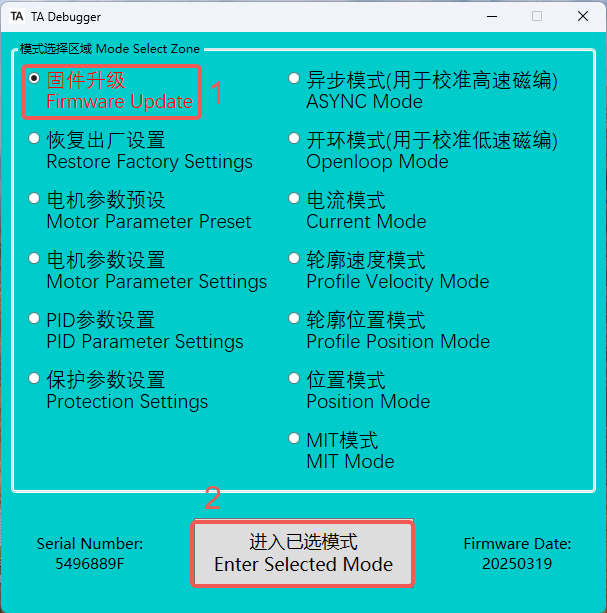
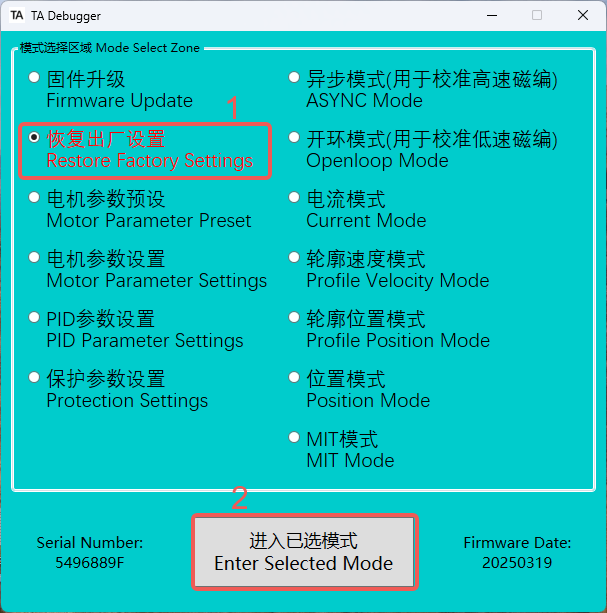
选择固件升级模式
-
进入固件升级模式,LED指示灯变为常亮绿灯
-
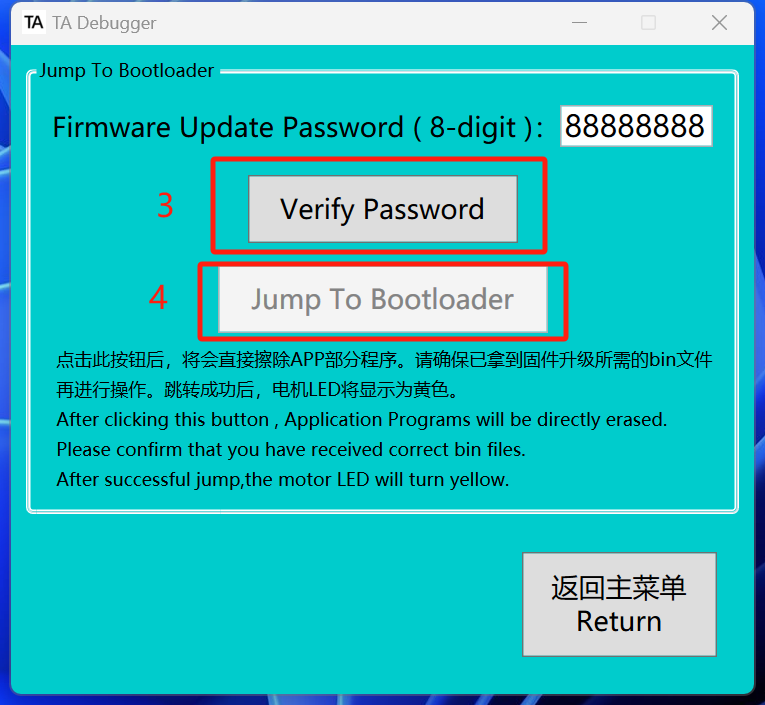
验证密码,密码为88888888
-
跳转到bootloader
-
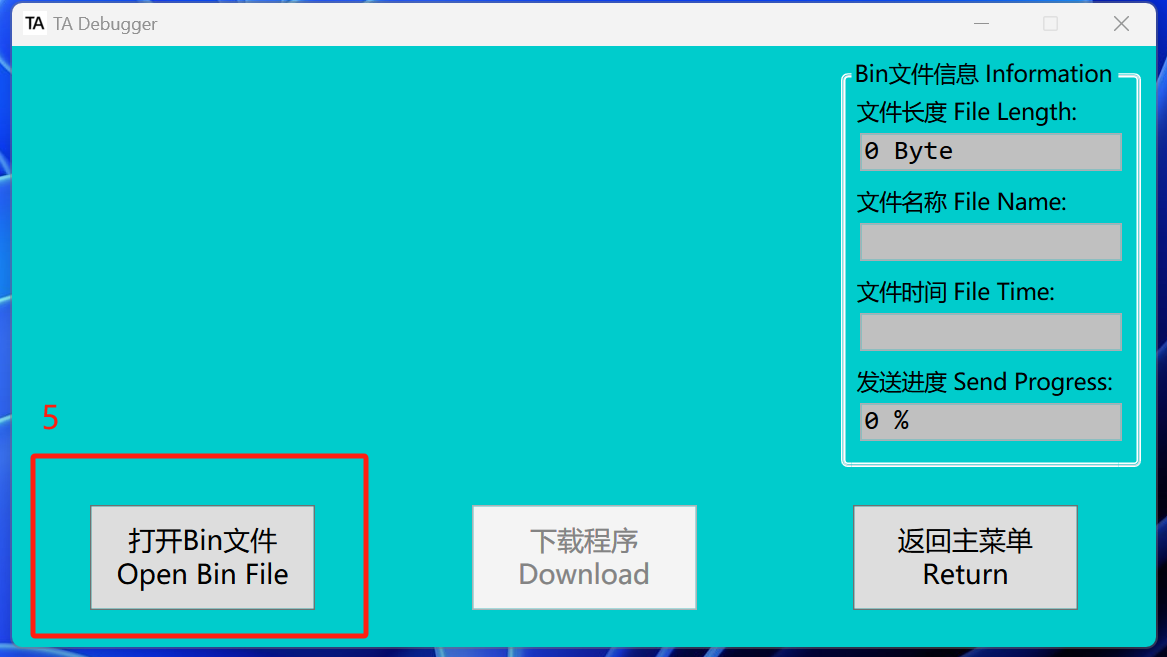
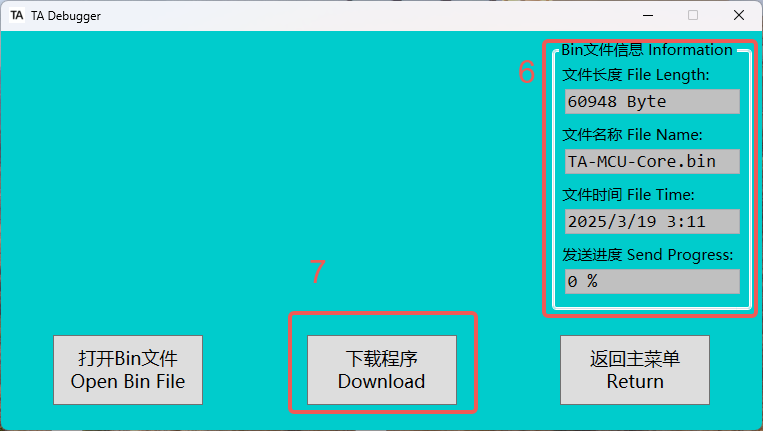
进入bootloader之后,LED指示灯变为橙色,确认LED状态正确后,点击打开Bin文件,并选择最新日期版本的bin文件,bin文件可在官方链接中下载或者联系相关技术人员发送
-
打开bin文件后,请检查文件名称与日期

-
点击下载程序后,便会马上开始下载程序,下载程序的过程由三种不同LED的颜色代表进度,白色代表正在下载程序,紫色代表正在校验,蓝色代表下载完成。
💡请注意,一定要观察执行器上LED的颜色而不是软件上字体的颜色。



-
当下载完成后,返回主菜单
恢复出厂设置
-
如果固件更新导致 EEPROM/Flash 原有内容发生更改(在change.txt文件中会有说明),则需要执行恢复出厂设置和电机参数标定。
-
在选择“恢复出厂设置”后,请进入所选模式。进入成功后,LED 指示灯将变为常亮的绿色。
-
点击“恢复出厂设置”后,若恢复成功,系统会提示“恢复完成”。若恢复失败,将显示失败信息。请注意,恢复出厂设置后,CAN ID 将重置为默认值
0x05060000。如果恢复前的 ID 不是0x05060000,则需要关闭软件并重新输入正确的 CAN ID 后再进入软件。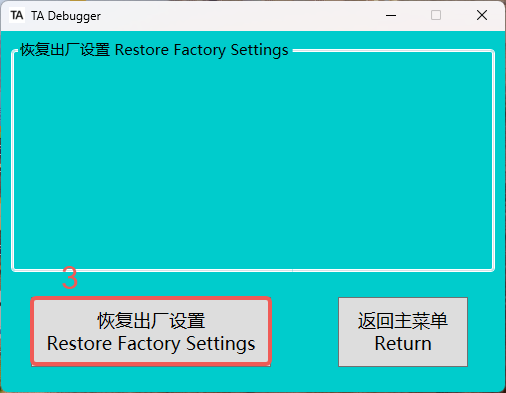

电机参数标定
-
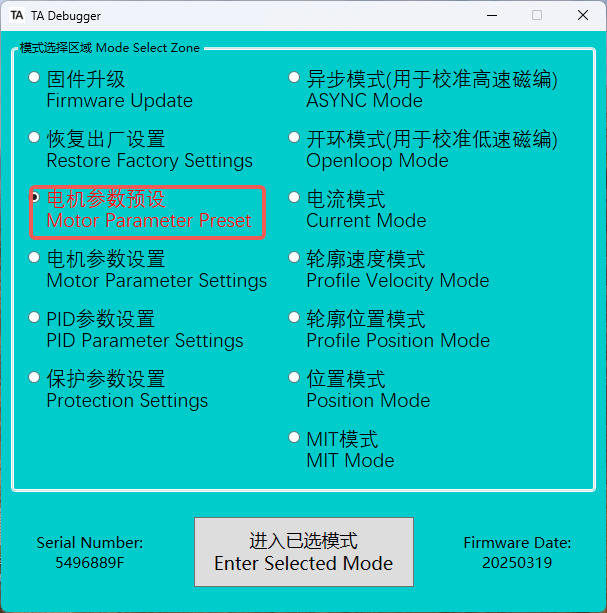
当进行了恢复出厂设置之后,编码器零位会发生变化,会导致执行器无法工作,因此需要进入电机参数设置模式进行电机参数标定,因此,只要恢复出厂设置之后,就必须要进行电机参数识别来重新标定编码器零位.
-
选择完电机参数设置模式后,请进入已选模式,LED指示灯变为常亮绿灯
-
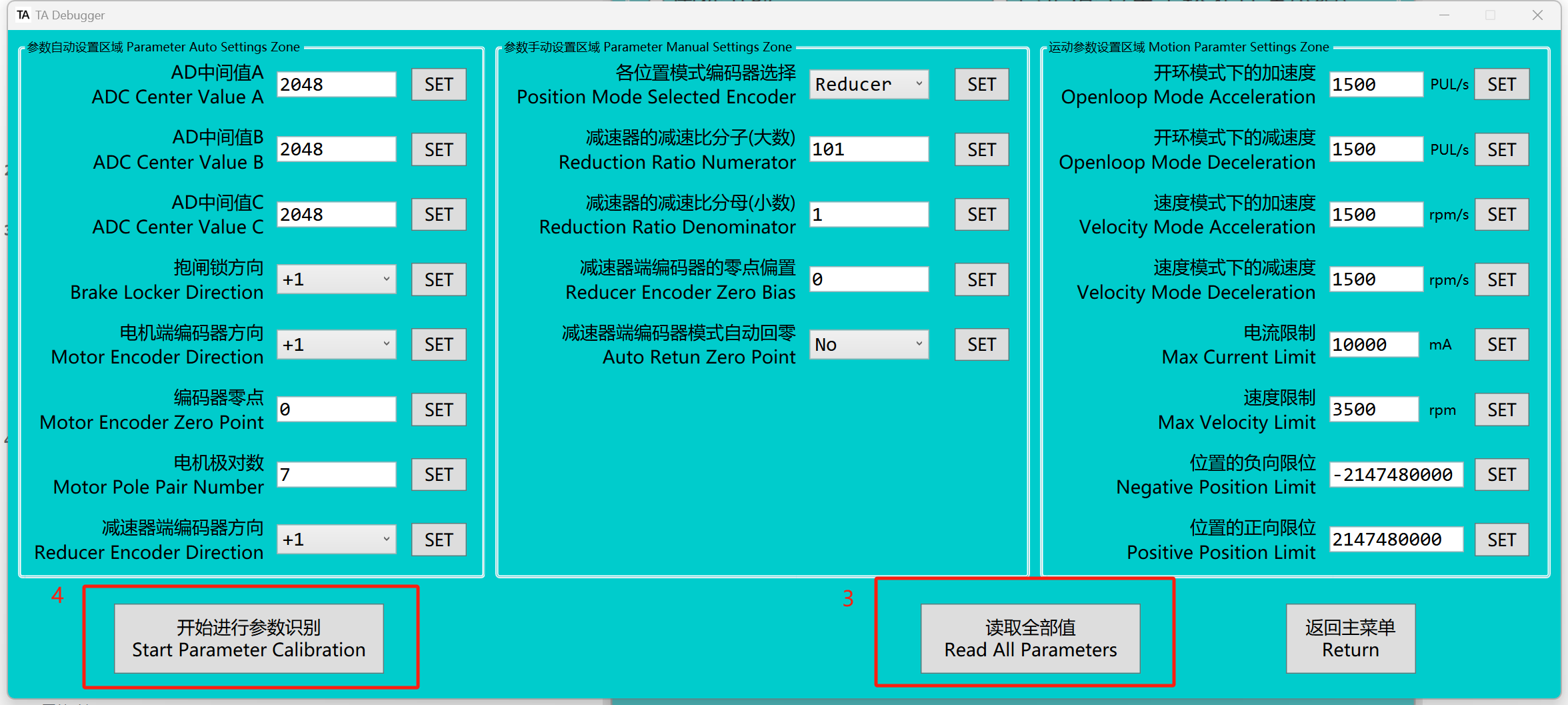
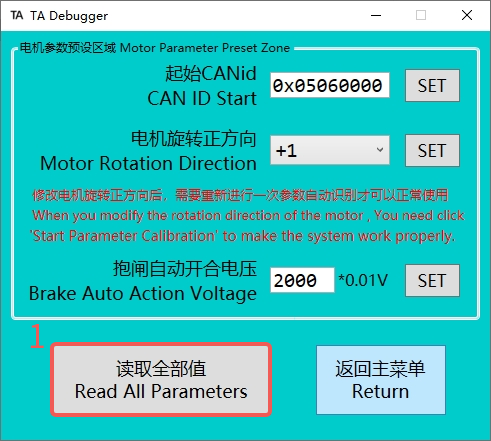
点击读取全部值。
-
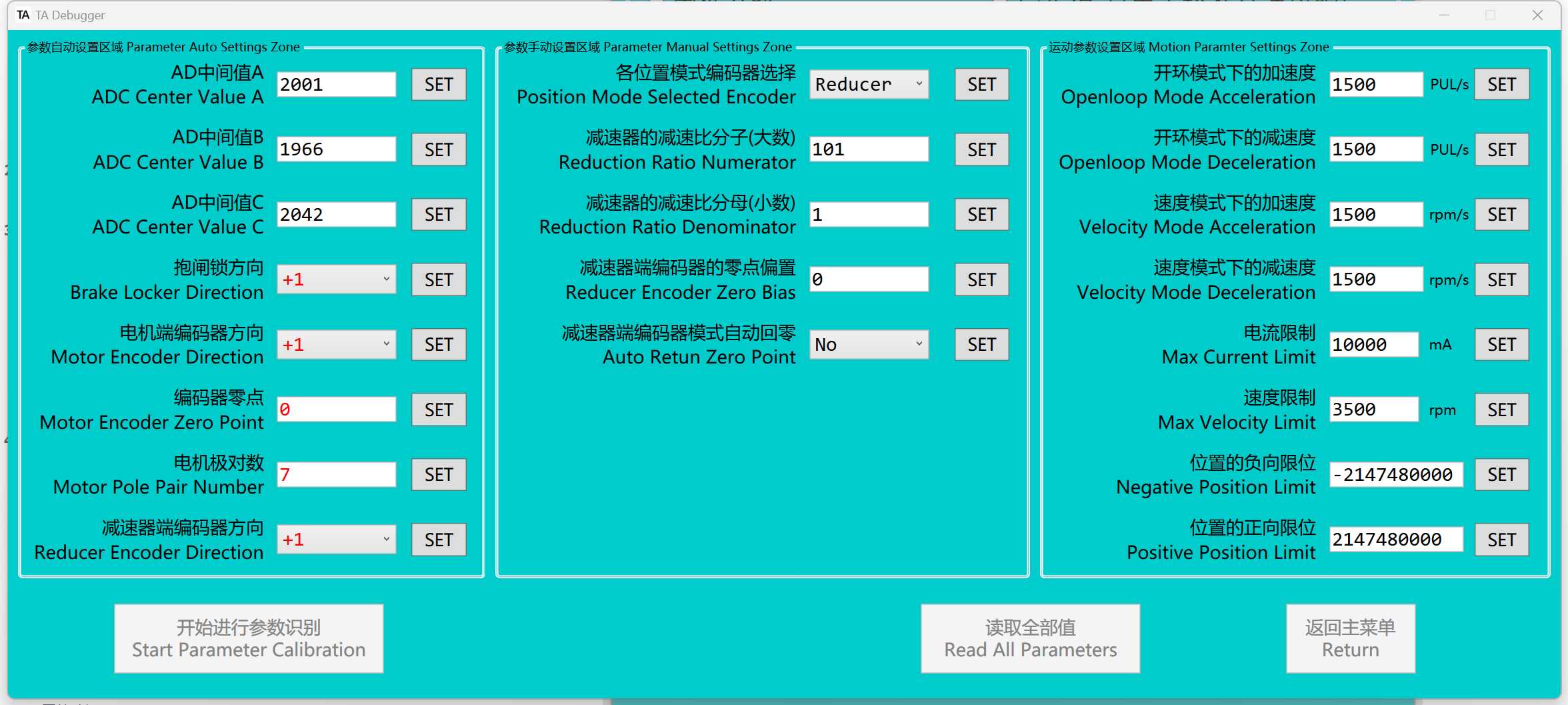
此时需确保减速器端无负载,并进行参数标定。若输出端存在负载,参数标定可能会失败;若编码器零点标定错误,执行器将无法正常工作。
✅未开始识别的值为红色,识别完成的值为黑色
-
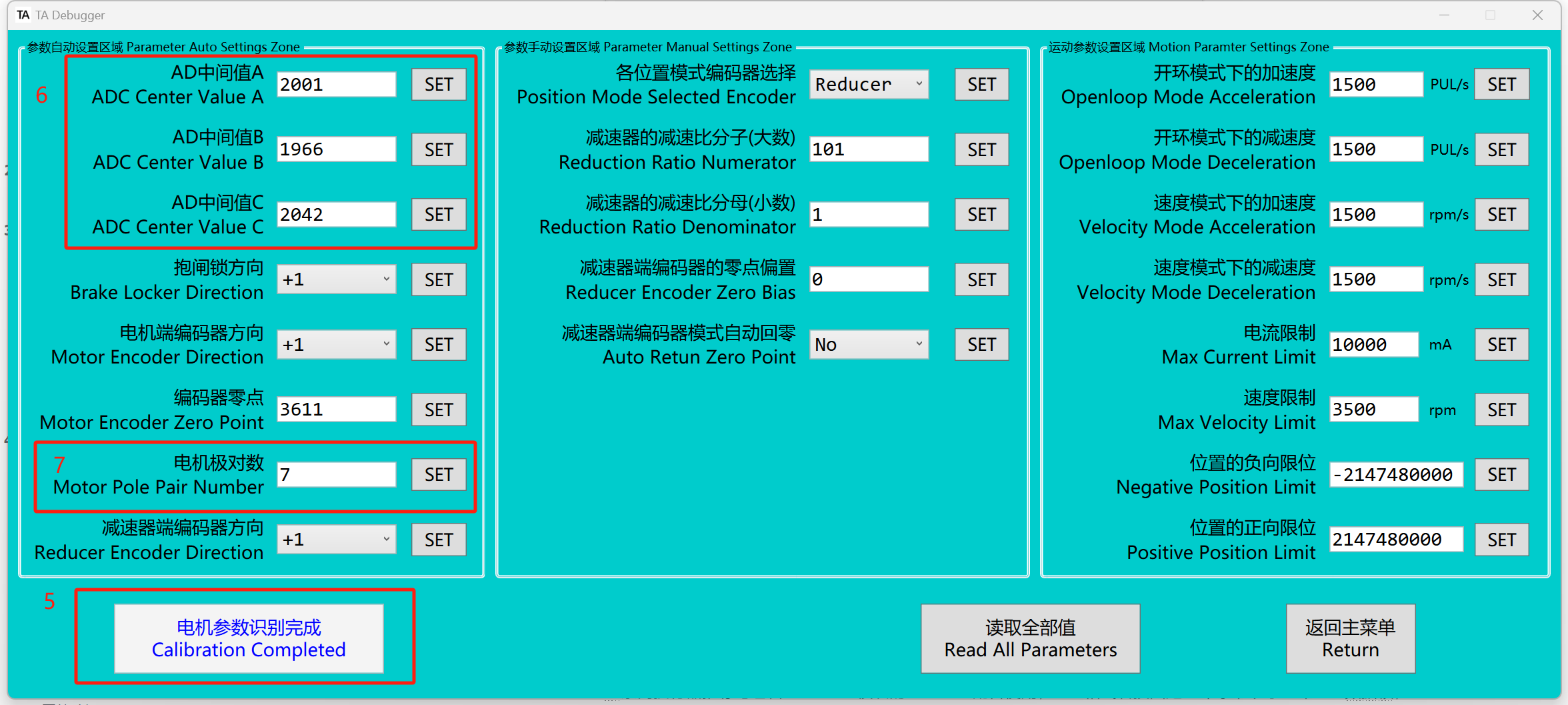
当提示电机参数标定完成后,便完成了。
-
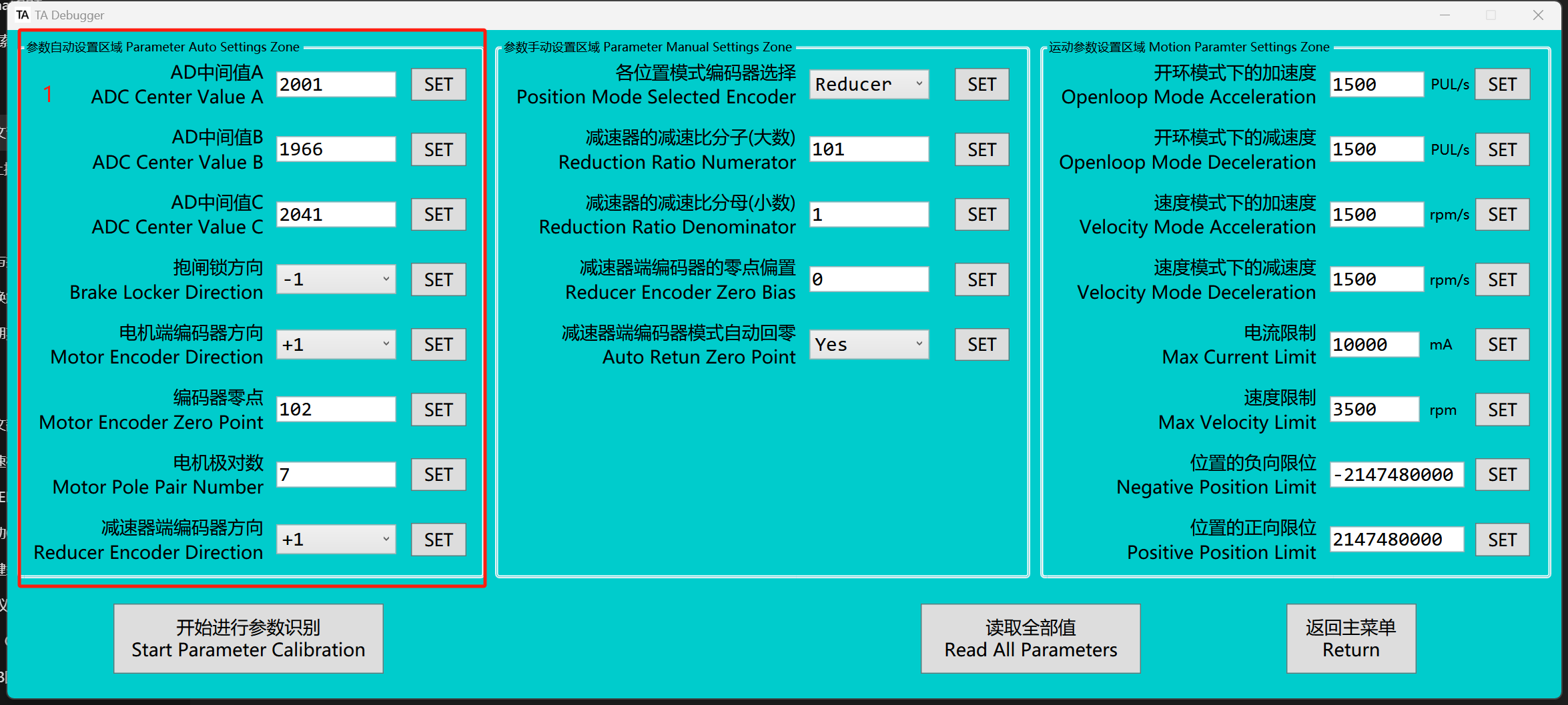
TA52和TA70的AD中间值A/B/C识别出来应该在2048±100区间,否则代表硬件有故障,请联系相关技术人员处理
-
TA52识别出来的电机极对数应为7,TA70识别出来的极对数应为10,否则代表硬件有故障,请联系相关技术人员处理
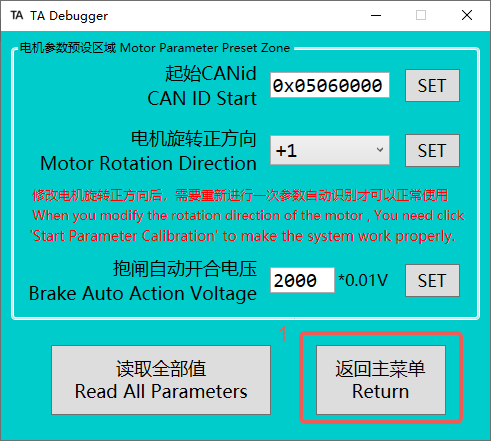
电机参数预设
-
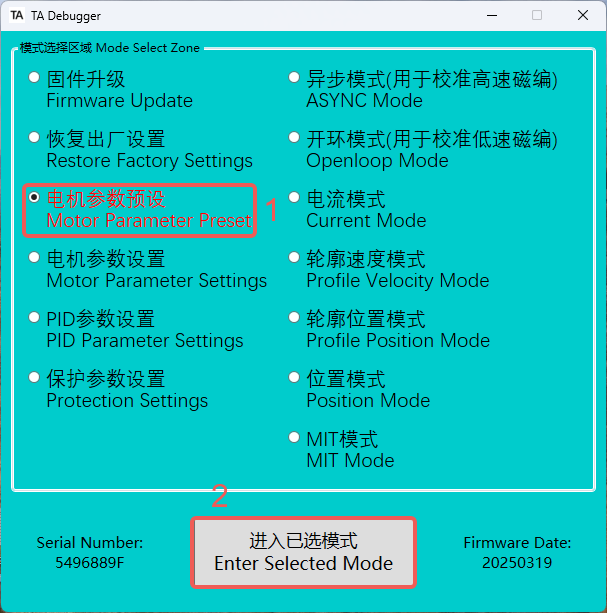
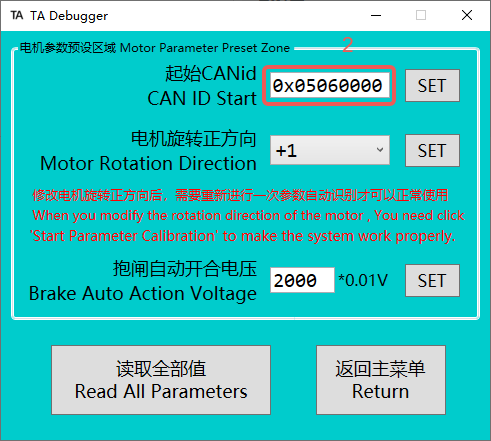
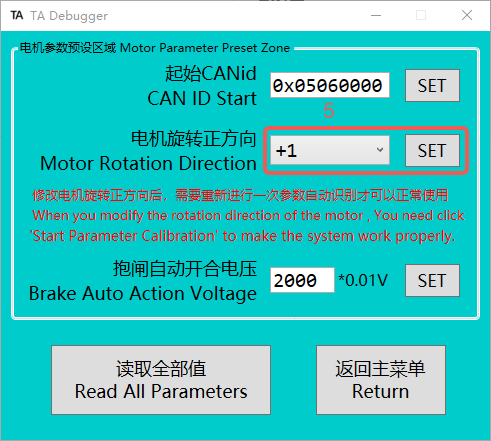
电机参数预设中,可以设置CAN ID Start(代表电机ID)和电机旋转方向,若要设置这两个值,则需要先读取全部值
-
若要将0号电机改为1号电机,则需要将CAN ID Start改为
0x05060100Frame ID
05060000Fixed Value
Motor ID
Mode Code
-
修改完后,需要点击SET,当左边数值的颜色由红变黑,代表设置完成
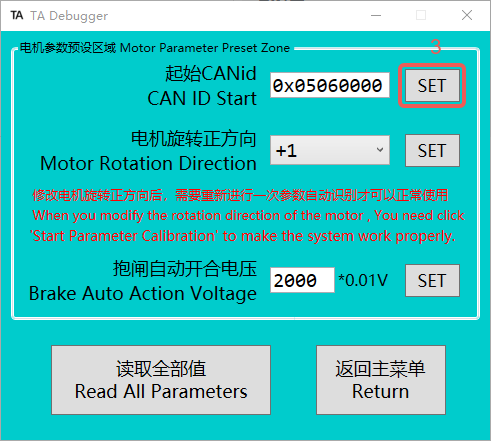
-
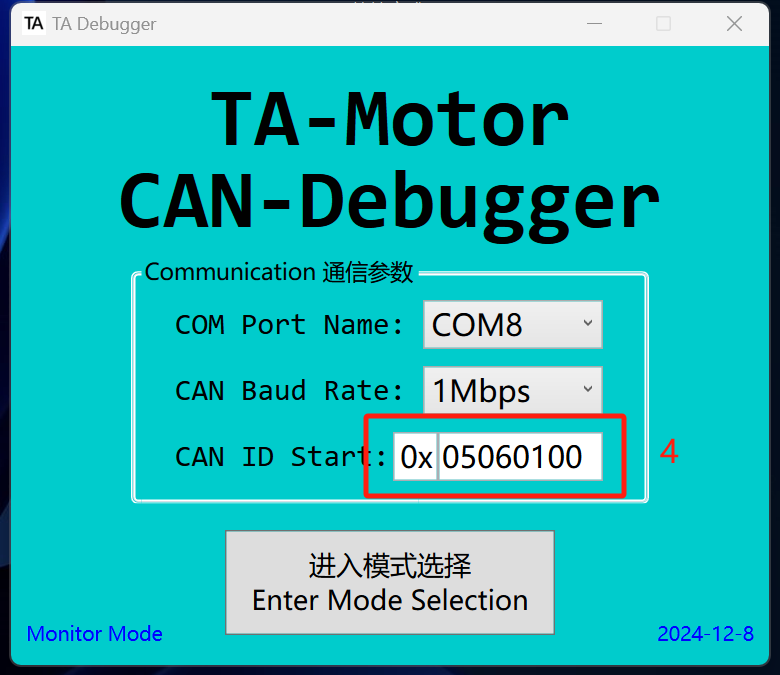
当ID发生修改,需要使用新的ID值重新进入TA-Debugger
-
每台TA执行器出厂标准为逆时针旋转为正数,顺时针旋转为负数,如需要改变,则将电机旋转正方向的值取反即可
🚨电机旋转正方向一旦发生更改,就需要重新进行电机参数标定
-
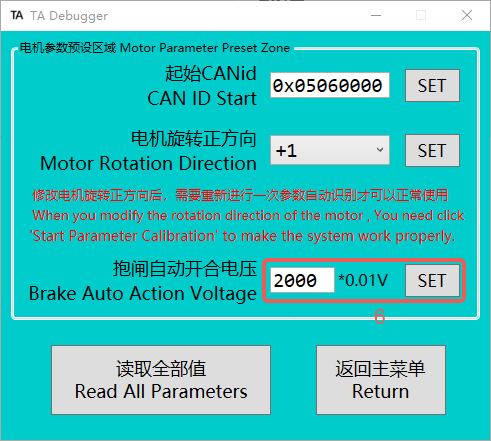
抱闸输入PWM的电压以0.01V为单位,比如输入2000,电压是20.00V
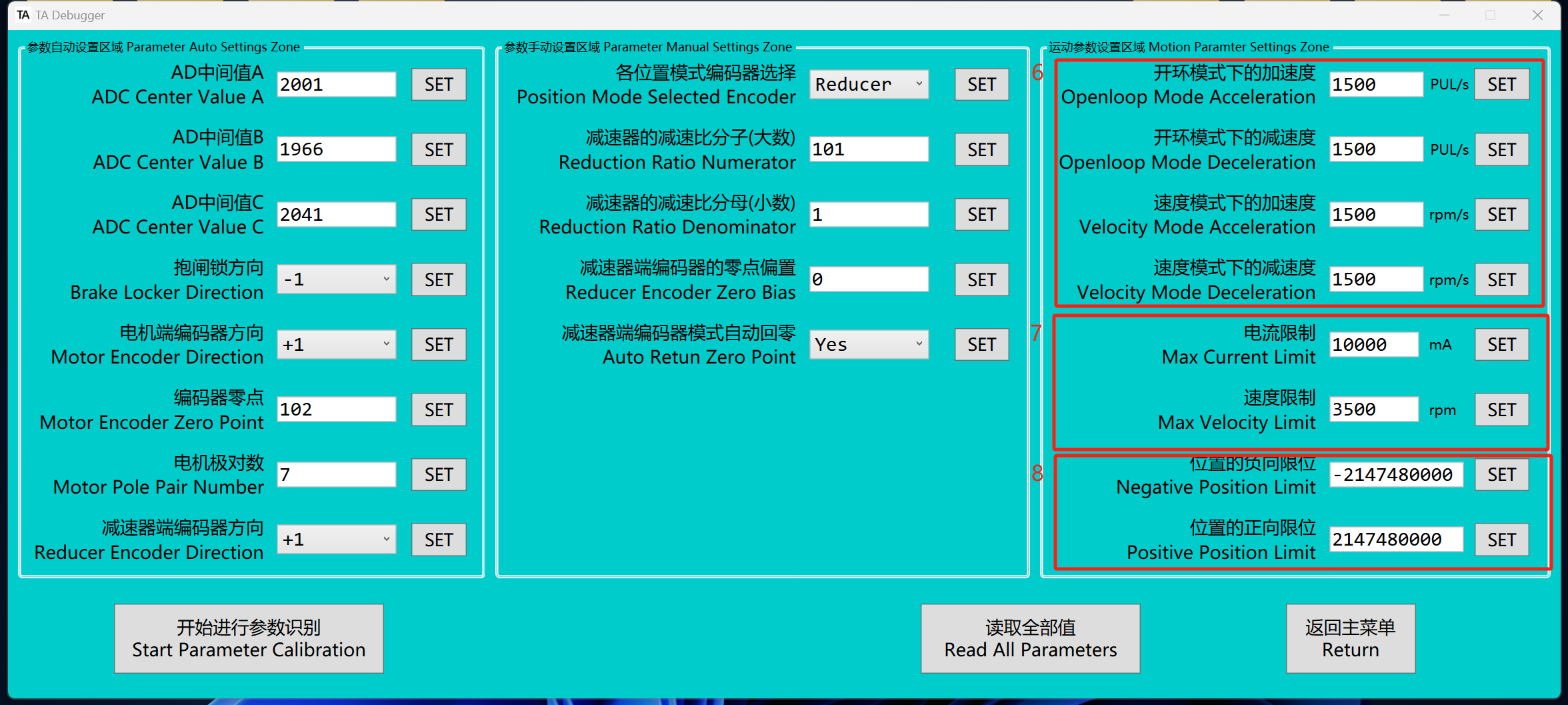
电机参数设置 Motor Parameter Settings
-
最左边这一栏为自动标定的电机参数,一般不需要修改,若需修改,请在专业人员的指导下进行
-
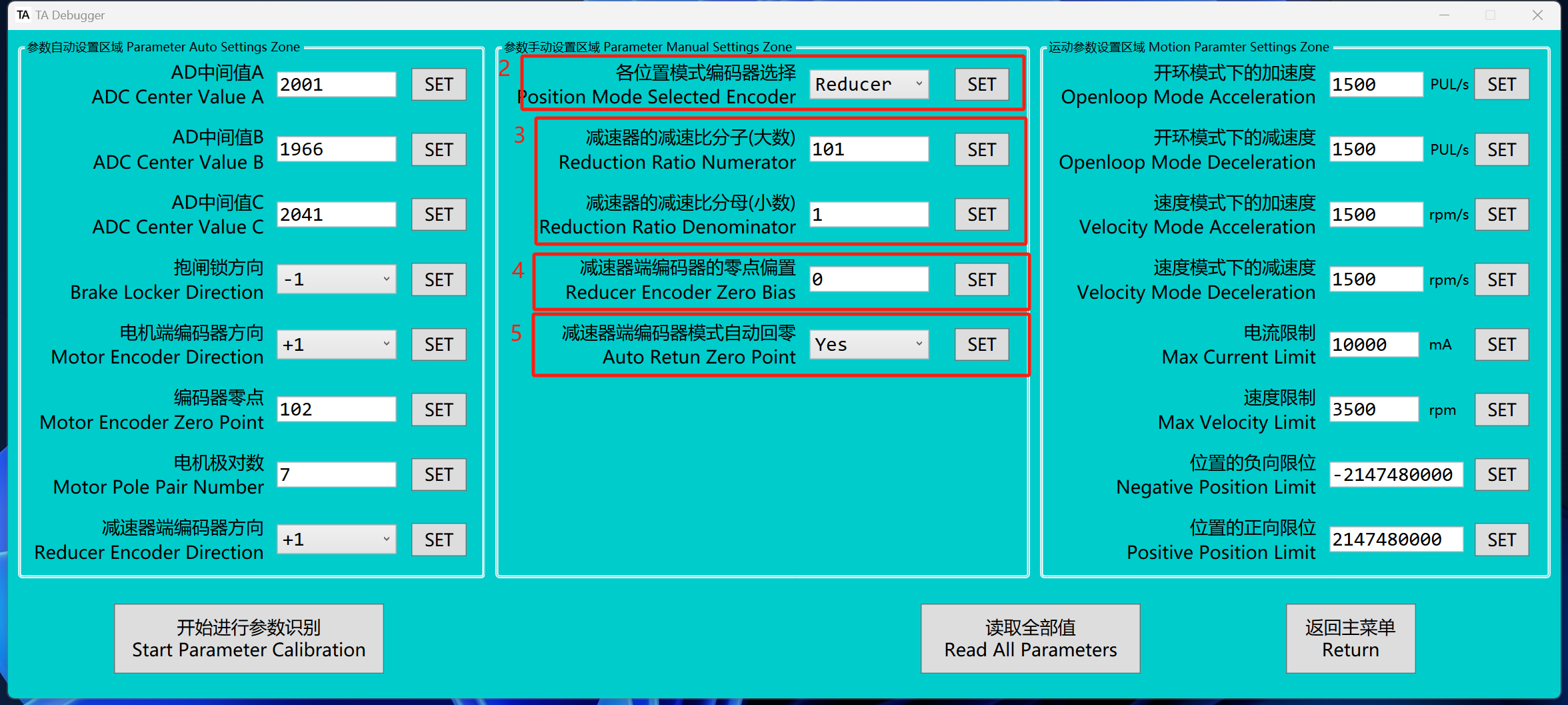
在位置模式的编码器选择中,默认值为 Reducer。即在位置相关的控制模式下,位置输入内容为减速器端的编码器值。若选择 Motor,则位置输入内容为电机端的编码器值。
-
减速比的值会根据实际减速器的减速比设置为不同的值,用户无需更改
-
通过修改减速器端编码器的零点偏置,可以调整减速器端的零位置。修改方法如下:将减速器端的位置旋转至期望的零点位置,记录当前位置值并写入。如果当前零点偏置值不为 0,则需要在现有值的基础上进行累加。
-
用户可以自行选择在进入各种位置模式时,是否自动回0
-
用户可修改开环模式和轮廓速度模式下的加减速参数,修改值存储于Flash中。同时,支持在开环模式或轮廓速度模式下实时调整加减速参数,实时调整的参数存储于RAM中。有关实时修改加减速的指令,请参见下文“CAN帧介绍”。
✅首次上电时,若未写入RAM,则调用Flash中的值;若已写入RAM,则调用RAM中的值。
🍞其中“速度模式下的加(减)速度”也适用于轮廓位置模式
-
电流限制仅在MIT模式下起作用,电流限制影响了非堵转下的加速度和堵转下的扭矩。速度限制值限制了所有控制模式下的电机转速
-
用户可以根据编码器的选择设置电机或减速器端的正负限位
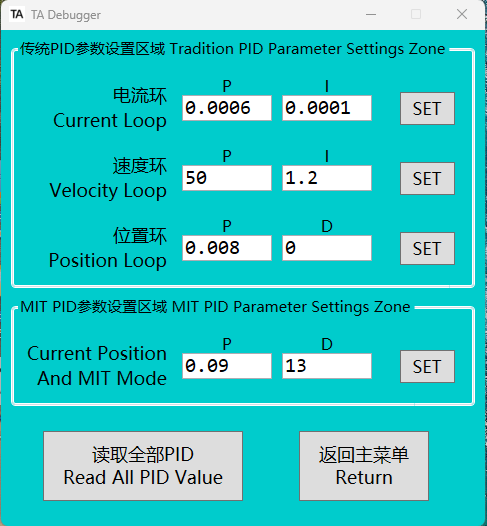
PID参数设置
- 用户可在此界面单次设置各类PID参数,参数值存储于Flash中。同时支持实时设置PID参数,实时设置的参数存储于RAM中。具体设置方法请参见下文“CAN帧介绍”。
✅
当首次上电,不写入ram,则会调用flash的值,若写入ram,则会调用ram的值。
保护参数设置 Protection Parameter Settings
用户可设置各类电机保护参数,但通常无需调整,这些参数已在出厂前设置完毕。当然,用户也可以根据实际使用场景对保护参数进行修改。

复位
- 当需要切换模式的时候,需要进行一次复位,在TA-Debugger中,返回主菜单=复位,发送完复位模式指令后,驱动器立刻重启,驱动器重启的时候,红灯先亮起,然后立即熄灭,接着蓝灯常亮.
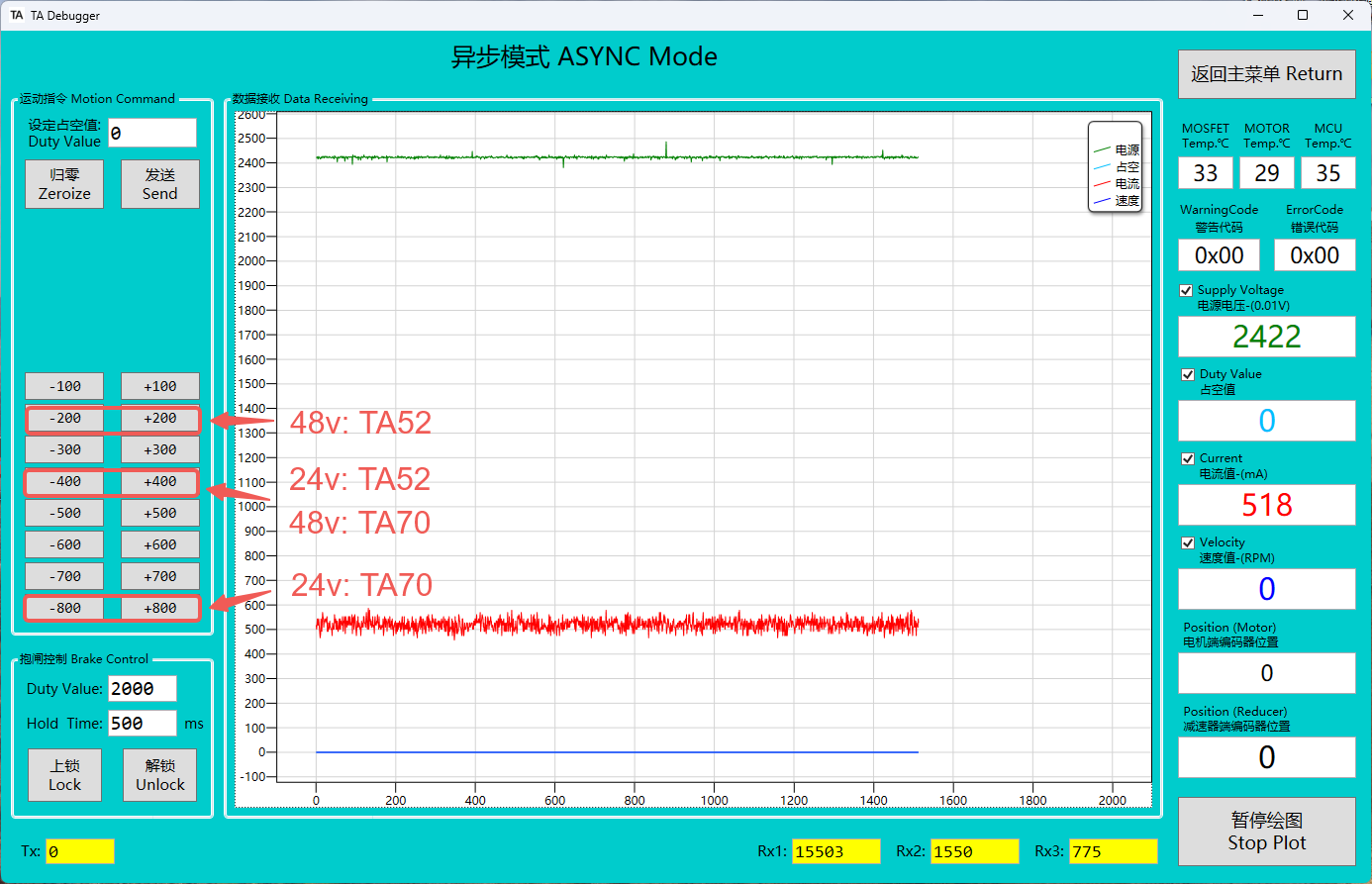
异步模式 ASYNC Mode
- 异步模式用于出厂时校准电机端编码器,可使电机在无需依赖传感器的情况下进行旋转。
📌
在执行器正常的情况下,请用户尽量避免使用此模式。此模式主要为用户远程校准编码器时所需开放。
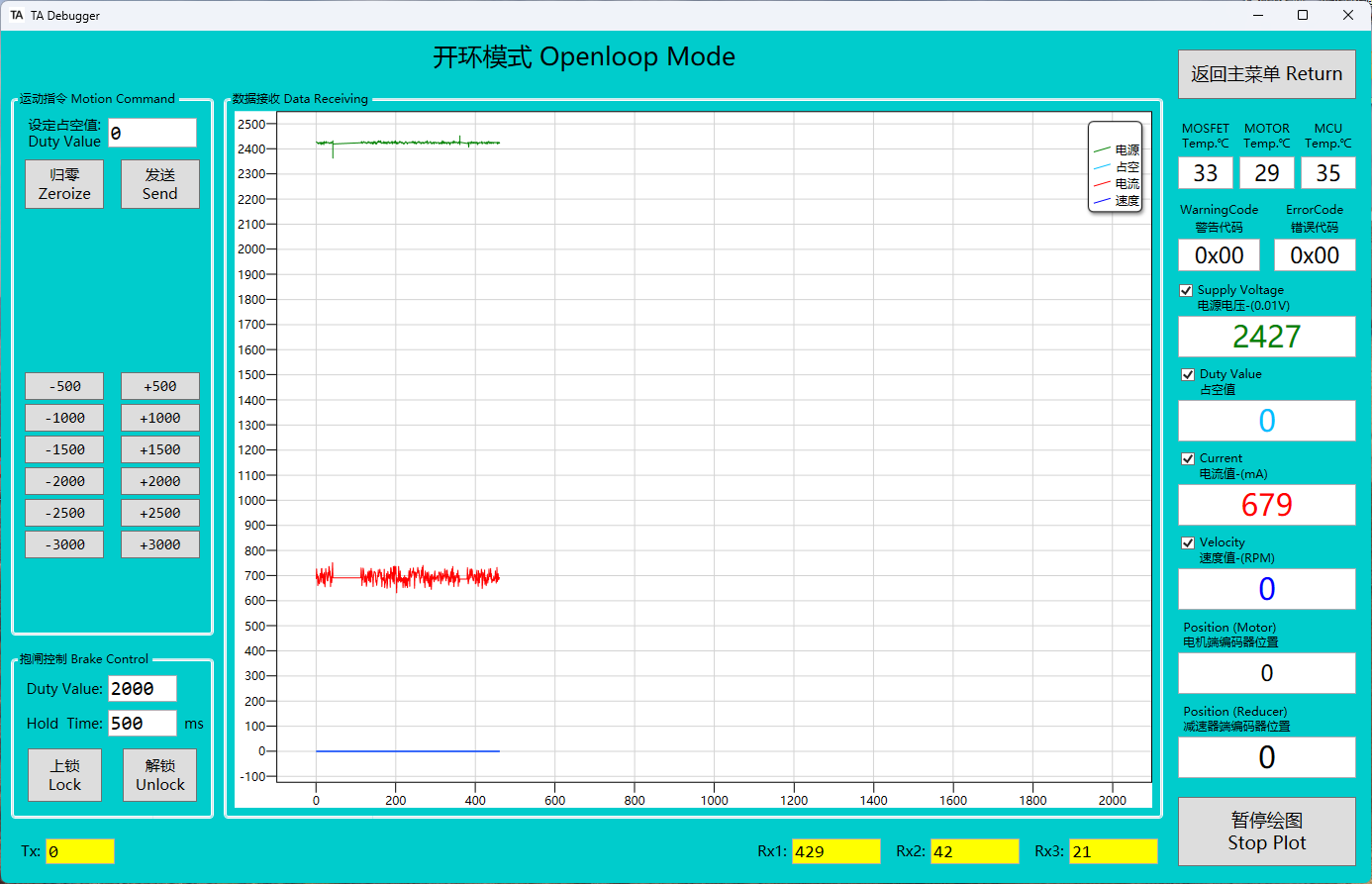
开环模式
- 开环模式是出厂时用于校准减速器端编码器用的,能够让电机进行简单的旋转
📌
在执行器正常的情况下,请用户尽量避免使用此模式。此模式主要为用户远程校准编码器时所需开放。
电流模式
-
进入电流模式后,LED状态指示灯由蓝边绿,同时刹车自动打开
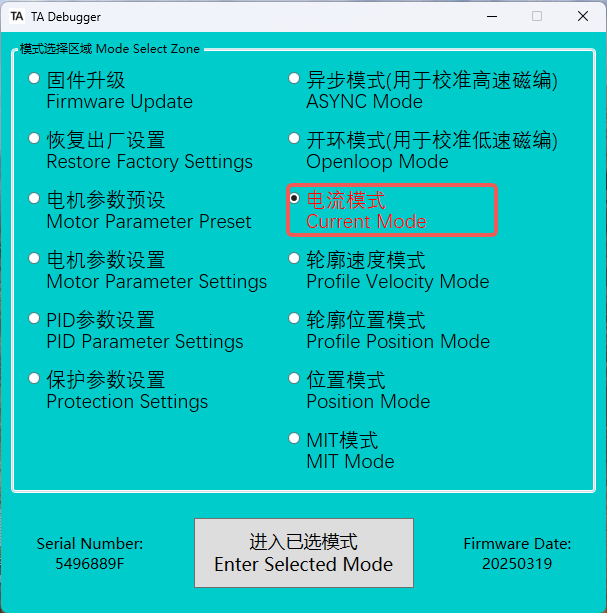
-
此区域为电流模式的控制区域,用户可以通过按钮或者输入具体的电流值来驱动电机,在调试电流模式的时候,请从小电流逐渐往上加,否则容易产生危险
-
此区域可以手动控制刹车的上锁与解锁状态,请不要修改PWM和时间值
-
点击停止绘图,可暂停生成的实时曲线图
-
通过勾选或取消勾选可以决定是否显示对应状态的曲线图
-
支持通过Flash存储进行修改(一次性修改)以及通过RAM进行修改(实时修改)该模式下电流环pid,具体的设置方法在下文的“Control Frame”中可查询
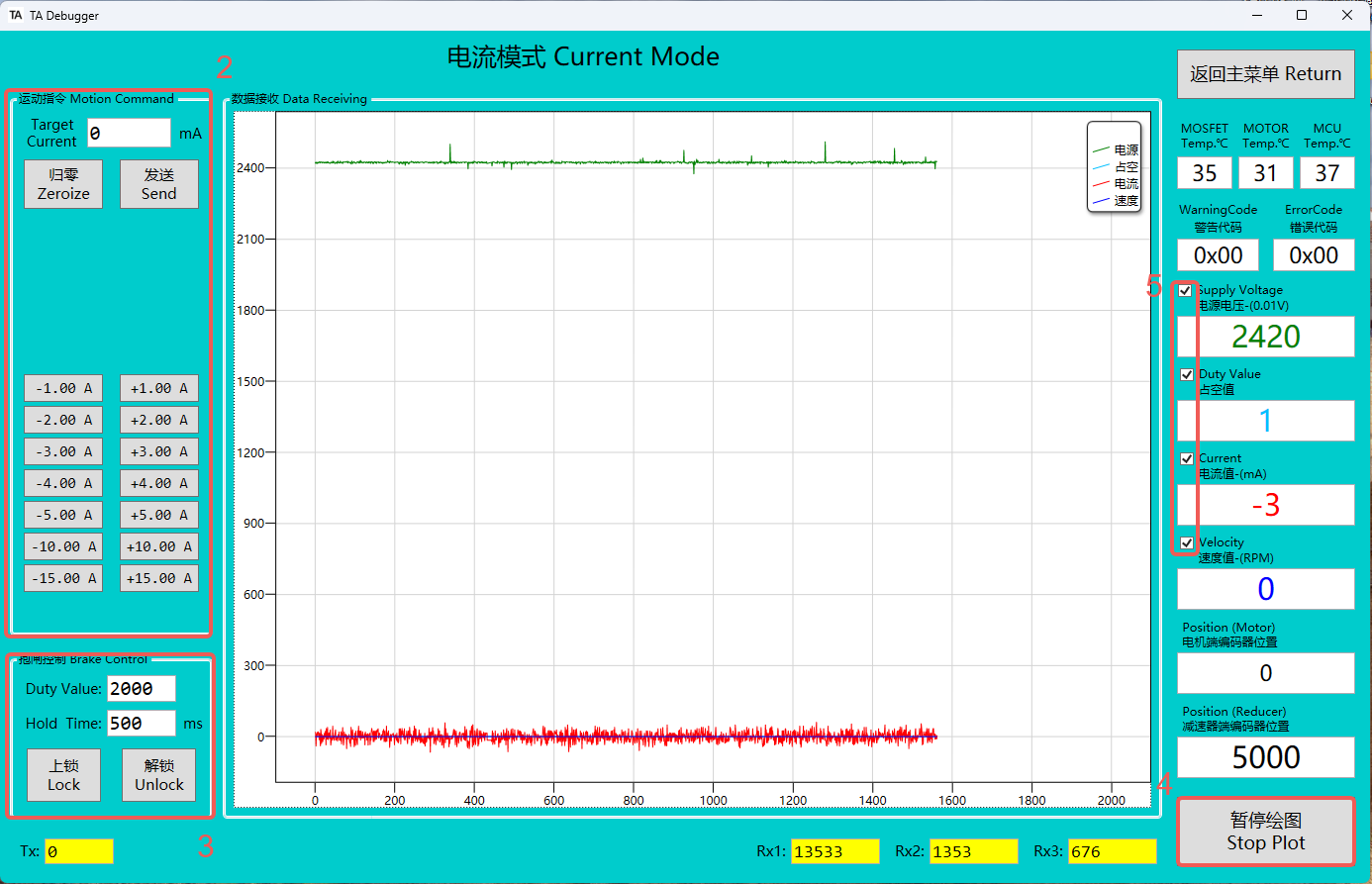
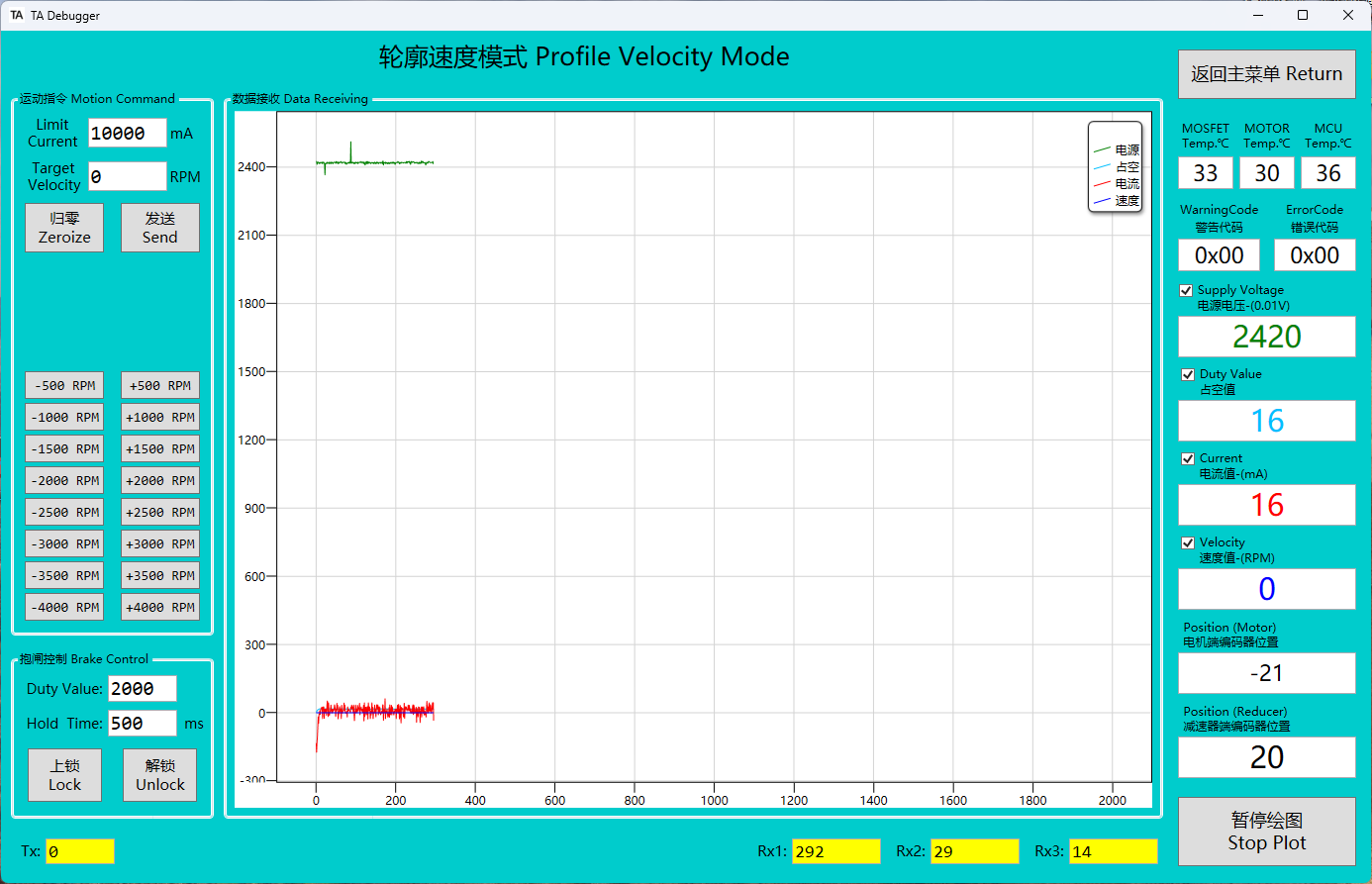
轮廓速度模式
- 进入轮廓速度模式后,LED状态指示灯由蓝变绿,同时刹车自动打开
- 可以同时对电流限制值和电机端速度进行控制。当电流限制设置过低时,可能会导致电机无法达到设定的速度,因为电流不足以提供所需的驱动力,从而限制了电机的转速输出。因此,在设定电流限制时需要确保其能够满足电机在目标速度下的负载需求,以避免出现速度无法达到预期值的情况。
- 支持通过Flash存储进行修改(一次性修改)以及通过RAM进行修改(实时修改)该模式下的加减速和电流环,速度环的pid,具体的设置方法在下文的“Control Frame”中可查询
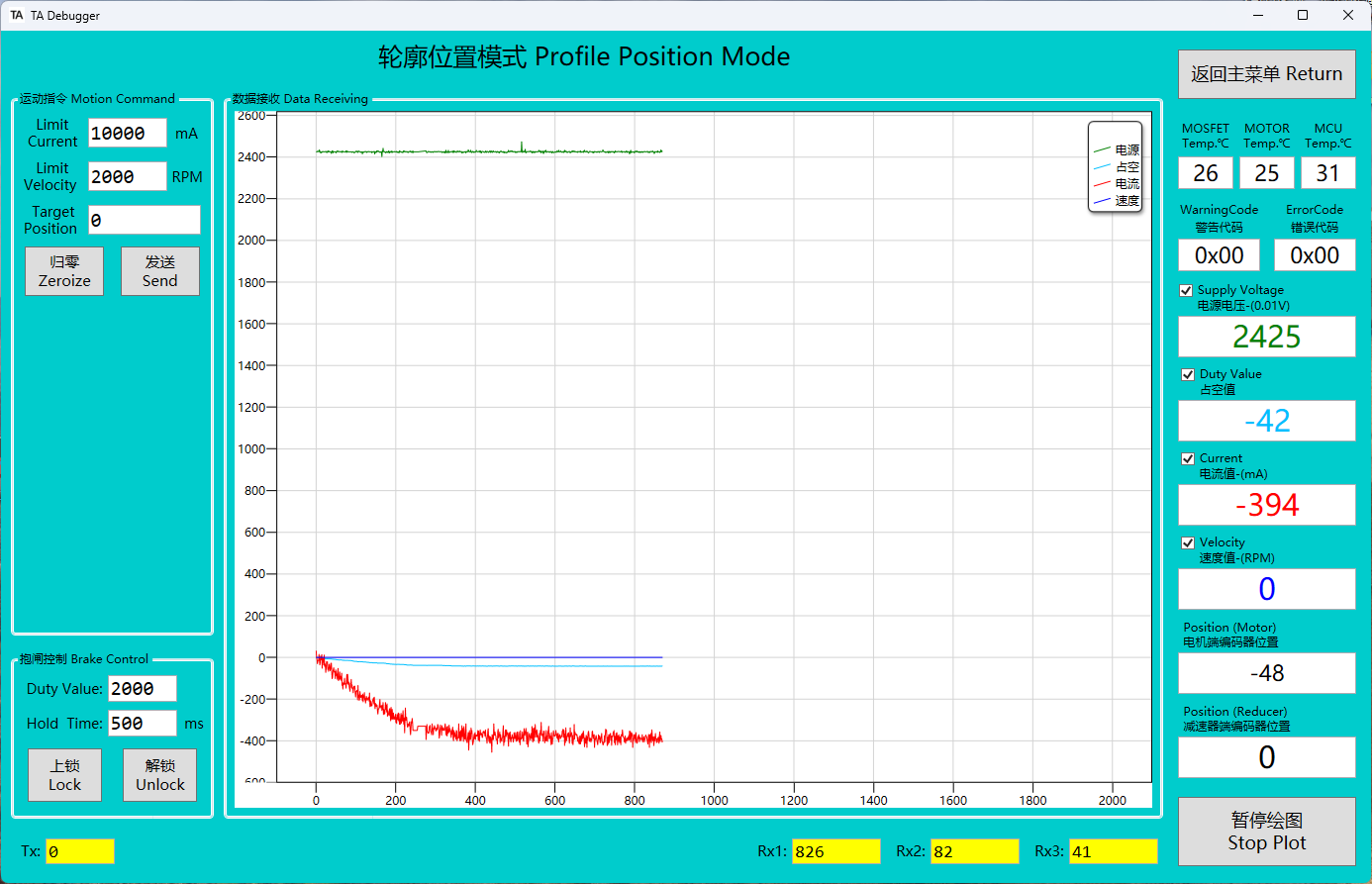
轮廓位置模式
- 轮廓位置模式内置轨迹规划功能,在上一段轨迹规划完成之前,发送的更新位置指令将被忽略。
- 进入轮廓位置模式后,LED状态指示灯由蓝变绿,同时刹车自动打开, 减速器端自动回到0点(可在电机参数设置中设置不自动回0点),退出时,抱闸会自动上锁。
- 可以同时控制电流限制、电机速度和减速器位置(可修改为电机位置)。如果电流限制过低,电机可能无法达到设定速度,因此需确保电流限制满足负载需求。
- 在该模式下,可以对加速与减速参数进行调整。该模式的加减速设置与轮廓速度模式共享一套数据结构,支持通过Flash存储进行修改(一次性修改)以及通过RAM进行修改(实时修改)。具体的配置方法请参考下文中的“Control Frame”部分
- 支持通过Flash存储进行修改(一次性修改)以及通过RAM进行修改(实时修改)该模式下的电流环,速度环和位置环的pid,具体的设置方法在下文的“Control Frame”中可查询
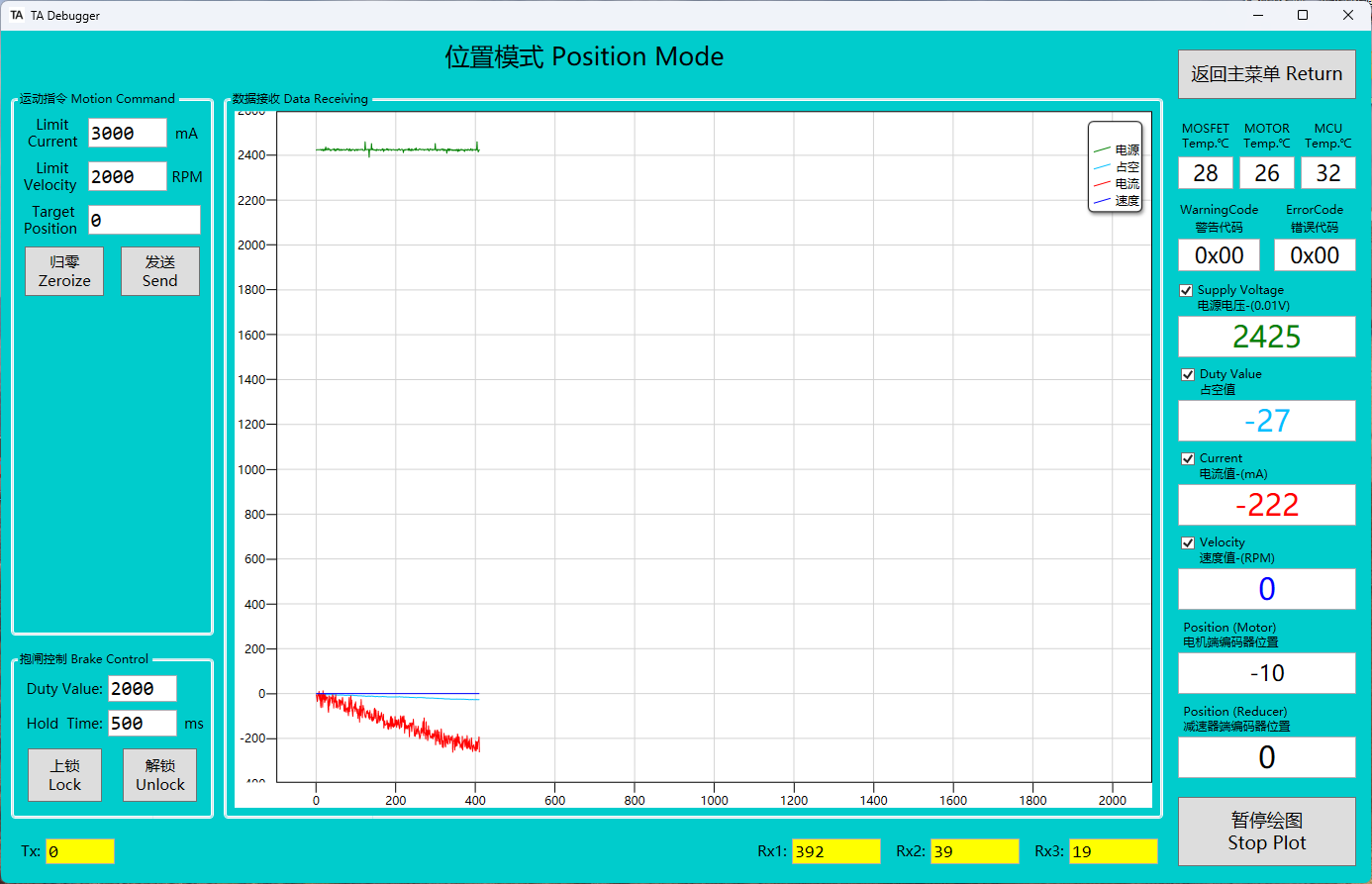
位置模式
- 此位置模式是三环架构,分别是位置环->速度环->电流环,区别于轮廓位置模式,此模式不内置轨迹规划,所以允许高频更新位置,需要在外部做轨迹规划。
- 进入位置模式后,LED状态指示灯从蓝变绿,刹车自动释放,减速器端自动回到0点(可在电机参数设置中关闭自动回0点功能)。退出模式时,抱闸会自动上锁。
- 可以同时控制电流限制、电机速度和减速器位置(可修改为电机位置)。如果电流限制过低,电机可能无法达到设定速度,因此需确保电流限制满足负载需求。
- 在该模式下,可以对加速与减速参数进行调整。该模式的加减速设置与轮廓速度模式共享一套数据结构,支持通过Flash存储进行修改(一次性修改)以及通过RAM进行修改(实时修改)。具体的配置方法请参考下文中的“Control Frame”部分
- 支持通过Flash存储进行修改(一次性修改)以及通过RAM进行修改(实时修改)该模式下的电流环,速度环和位置环的pid,具体的设置方法在下文的“Control Frame”中可查询
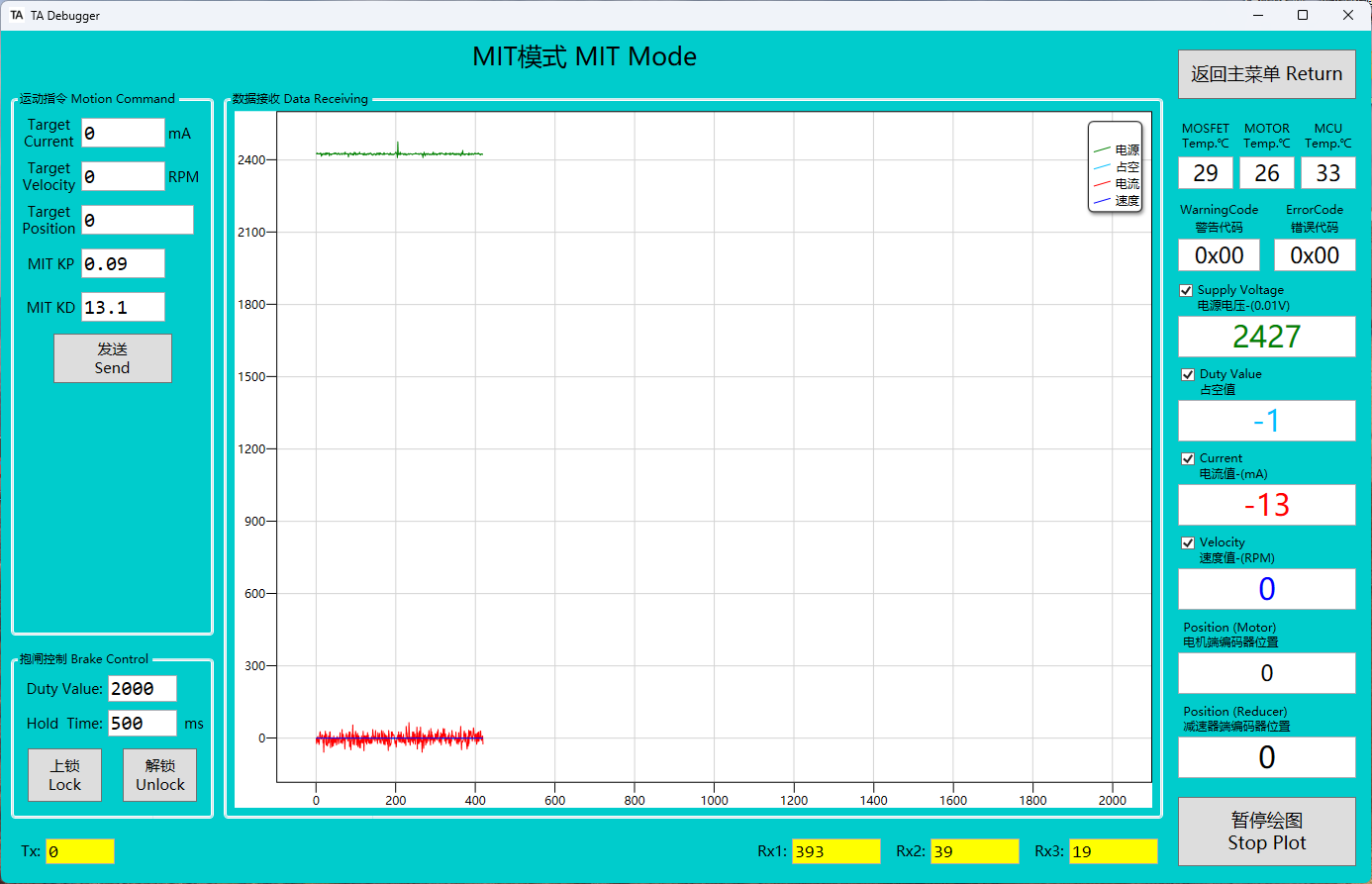
MIT模式
- 进入MIT模式后,LED状态指示灯由蓝边绿,同时刹车自动打开, 减速器端自动回到0点(可在电机参数设置中设置不自动回0点),退出时,抱闸会自动上锁。
- MIT模式是一种由麻省理工开发的专门的控制模式,主要用于精确的扭矩和电机控制应用。它允许对电机性能进行高级控制
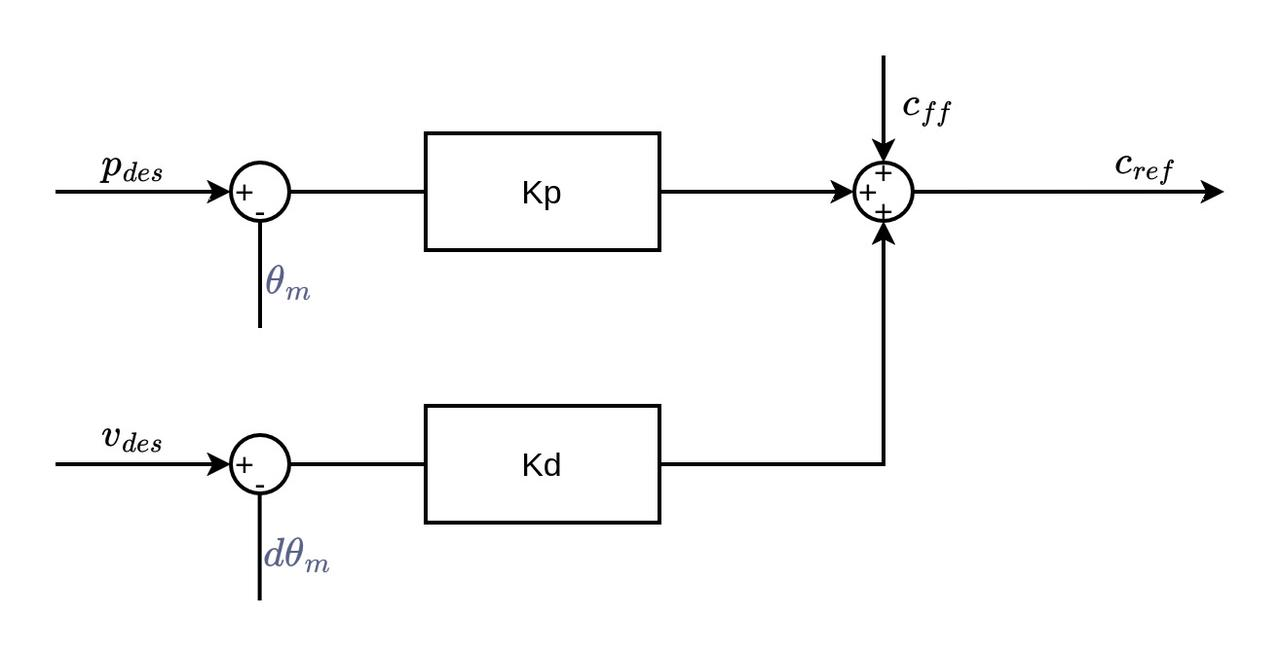
-
MIT模式下,需要分为两条CAN帧发送,一条帧为电机的电流,速度,和减速器的位置信息(可在电机参数设置中修改为电机端的位置),另一条为MIT_Kp和MIT_Kd,具体的设置方法在下文的“Control Frame”中可查询。同时它也受电机参数设置中的电流限制值影响。
-
简单的MIT控制模式例子
Set Position to 0°
Set Position to 360°
Set Velocity to 1000rpm
Set Current to 3A
current
0
0
0
3000
ma
velocity
0
0
1000
0
rpm
position
0
65536
0
0
Kp
0.09
0.09
0
0
Kd
13.1
13.1
30
0