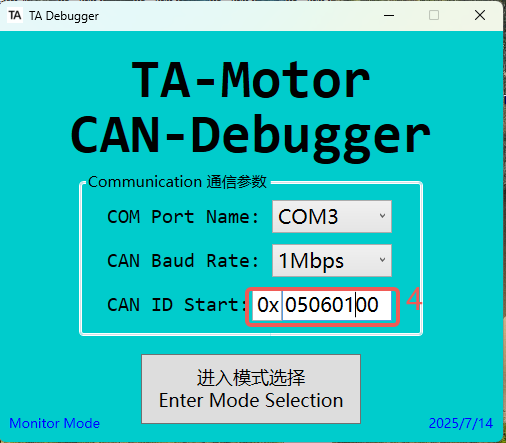
参数设置
参考视频:
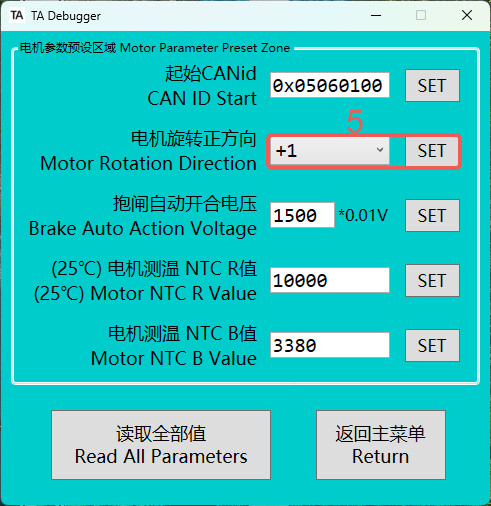
电机参数预设
-
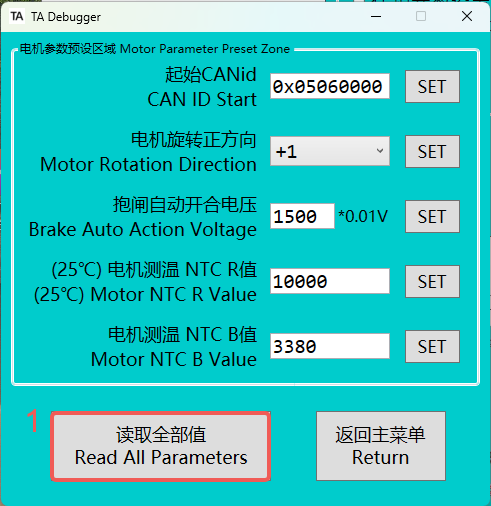
电机参数预设中,可以设置CAN ID Start(代表电机ID)和电机旋转方向,若要设置这两个值,则需要先读取全部值
-
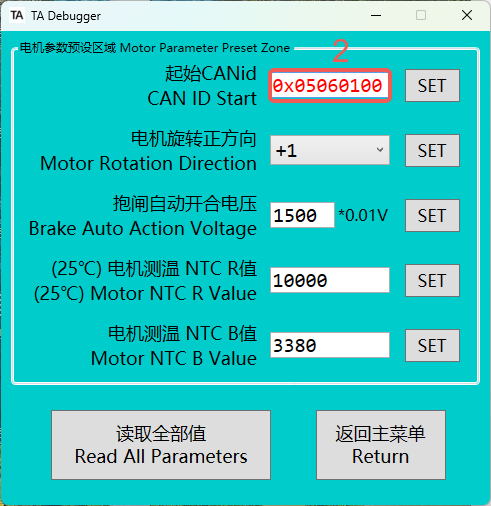
若要将0号电机改为1号电机,则需要将CAN ID Start改为
0x05060100Frame ID
05060000Fixed Value
Motor ID
Mode Code
-
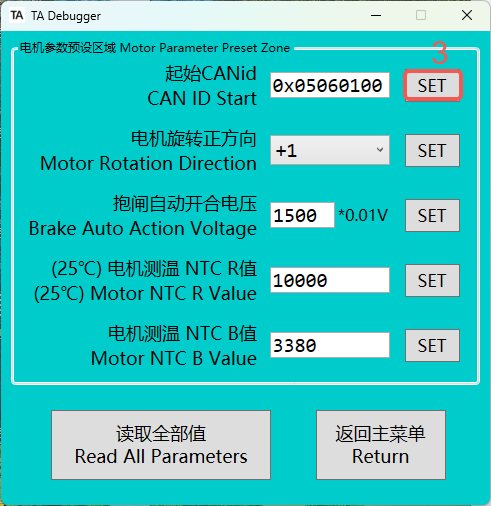
修改完后,需要点击SET,当左边数值的颜色由红变黑,代表设置完成
-
当ID发生修改,需要使用新的ID值重新进入TA-Debugger
-
每台TA执行器出厂标准为逆时针旋转为正数,顺时针旋转为负数,如需要改变,则将电机旋转正方向的值取反即可
🚨电机旋转正方向一旦发生更改,就需要重新进行电机参数标定
-
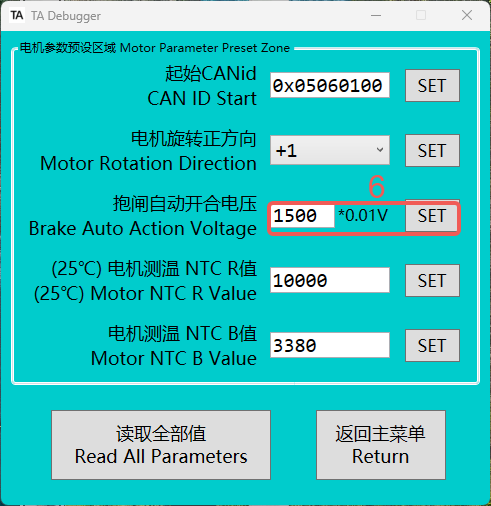
抱闸输入PWM的电压以0.01V为单位,比如输入2000,电压是20.00V
-
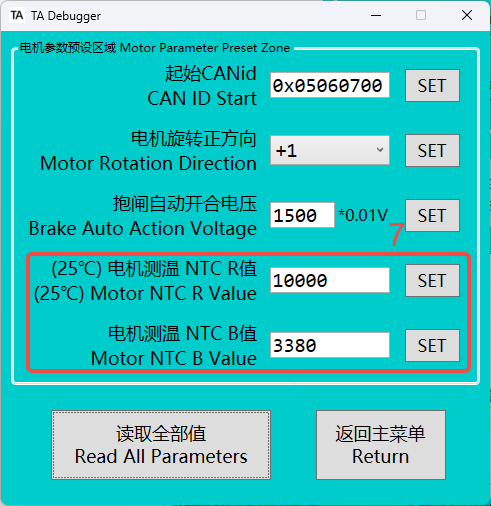
电机测温NTC R值与B值分别指25℃时电机端热敏电阻的电阻值与温度灵敏度系数(B值反应热敏电阻阻值随温度变化的特性系数),默认电机端热敏电阻25℃时的阻值为10k,B值为3380
一般而言,用户不需要更改这两个值
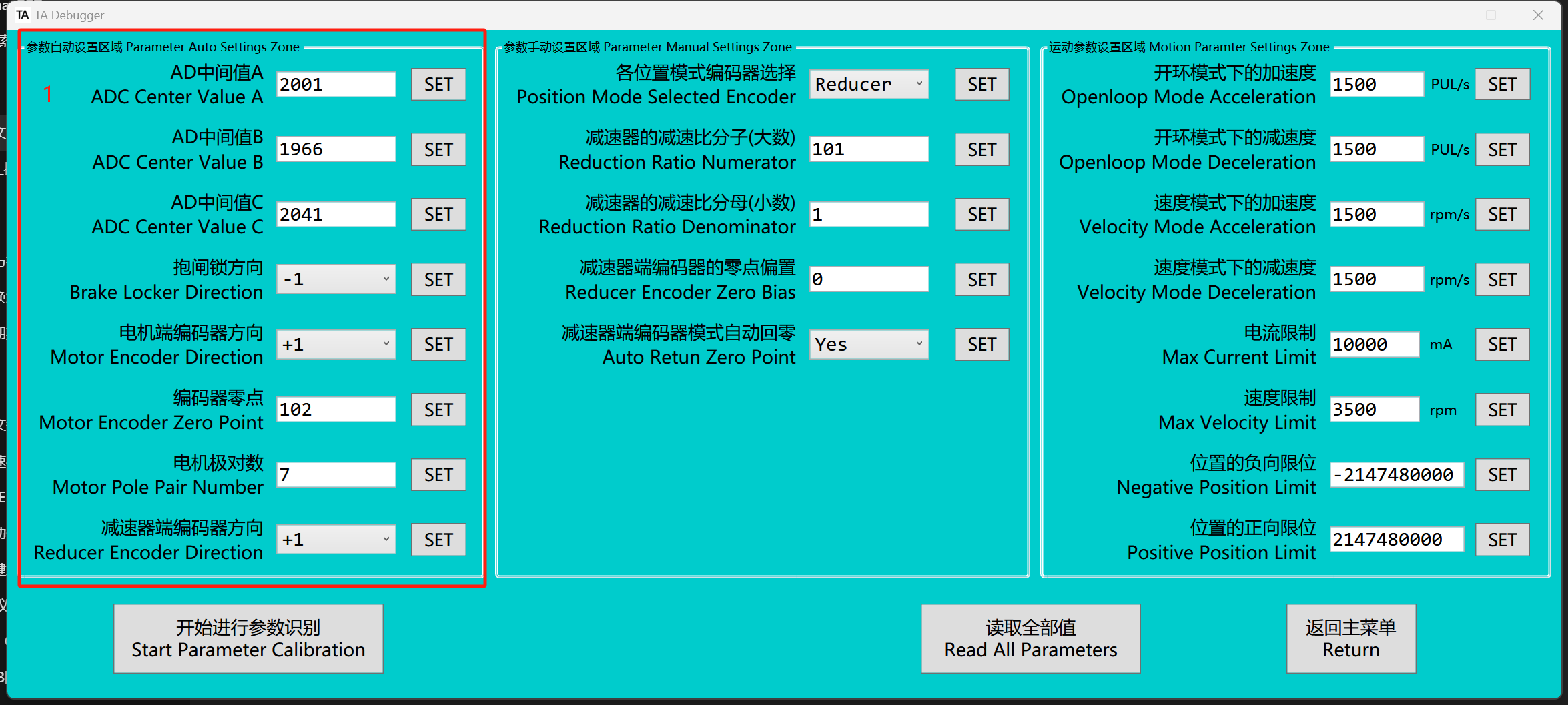
电机参数设置
下文中所说的“多种位置模式”是指:轮廓位置模式,位置模式,MIT模式
-
最左边这一栏为自动标定的电机参数,一般不需要修改,若需修改,请在专业人员的指导下进行
-
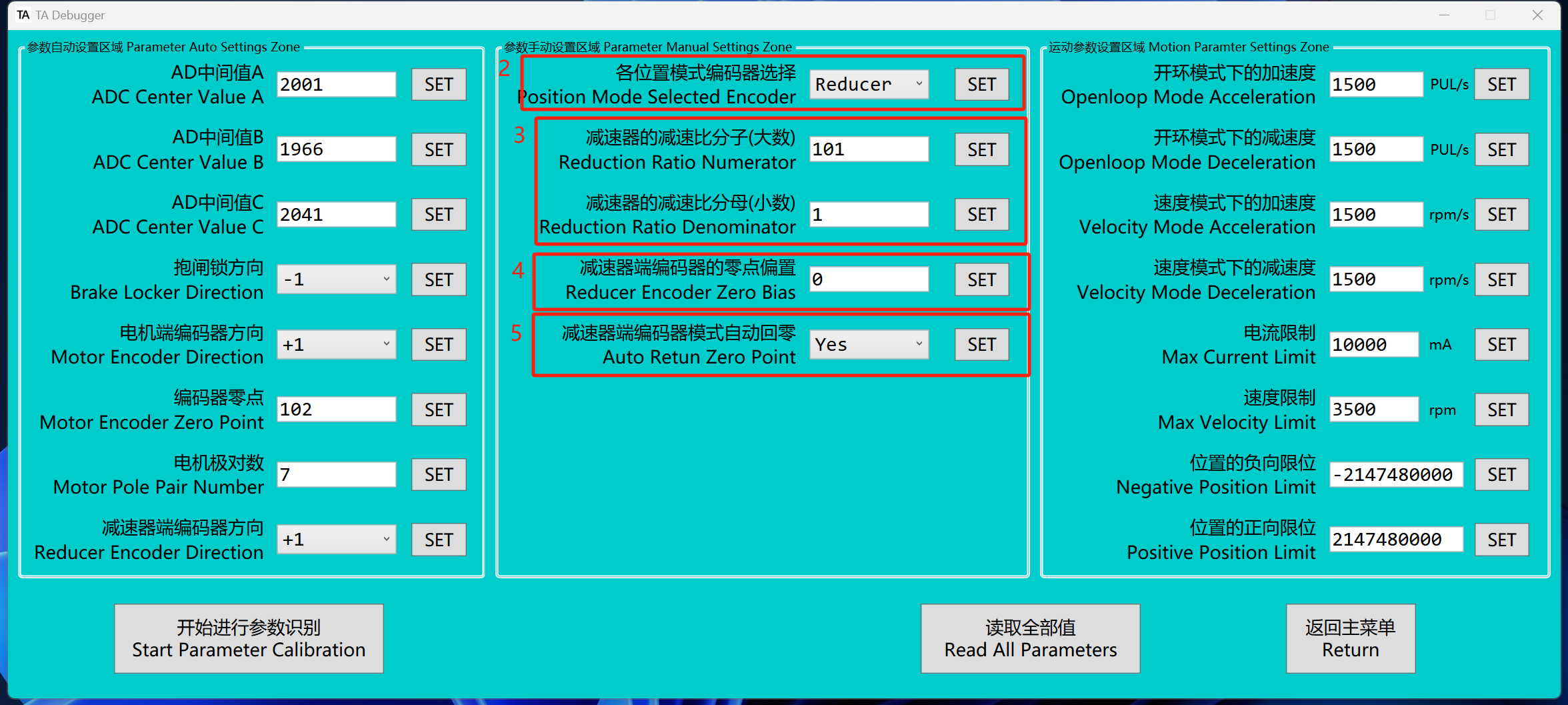
在“各位置模式的编码器选择”中,默认值为 Reducer。即在位置相关的控制模式下,位置输入内容为减速器端的编码器值,“位置的正(负)向限位”设置的也是减速器端的编码器值。若选择 Motor,则位置输入内容为电机端的编码器值,“位置的正(负)向限位”设置的也是电机端的编码器值。
-
减速比的值会根据实际减速器的减速比设置为不同的值,用户无需更改。
-
通过修改减速器端编码器的零点偏置,可以调整减速器端的零位置。修改方法如下:将减速器端的位置旋转至期望的零点位置,记录当前位置值并写入。如果当前零点偏置值不为 0,则需要在现有值的基础上进行累加。
-
这个参数可以决定,在进入各种位置模式时执行器是否会自动回0
-
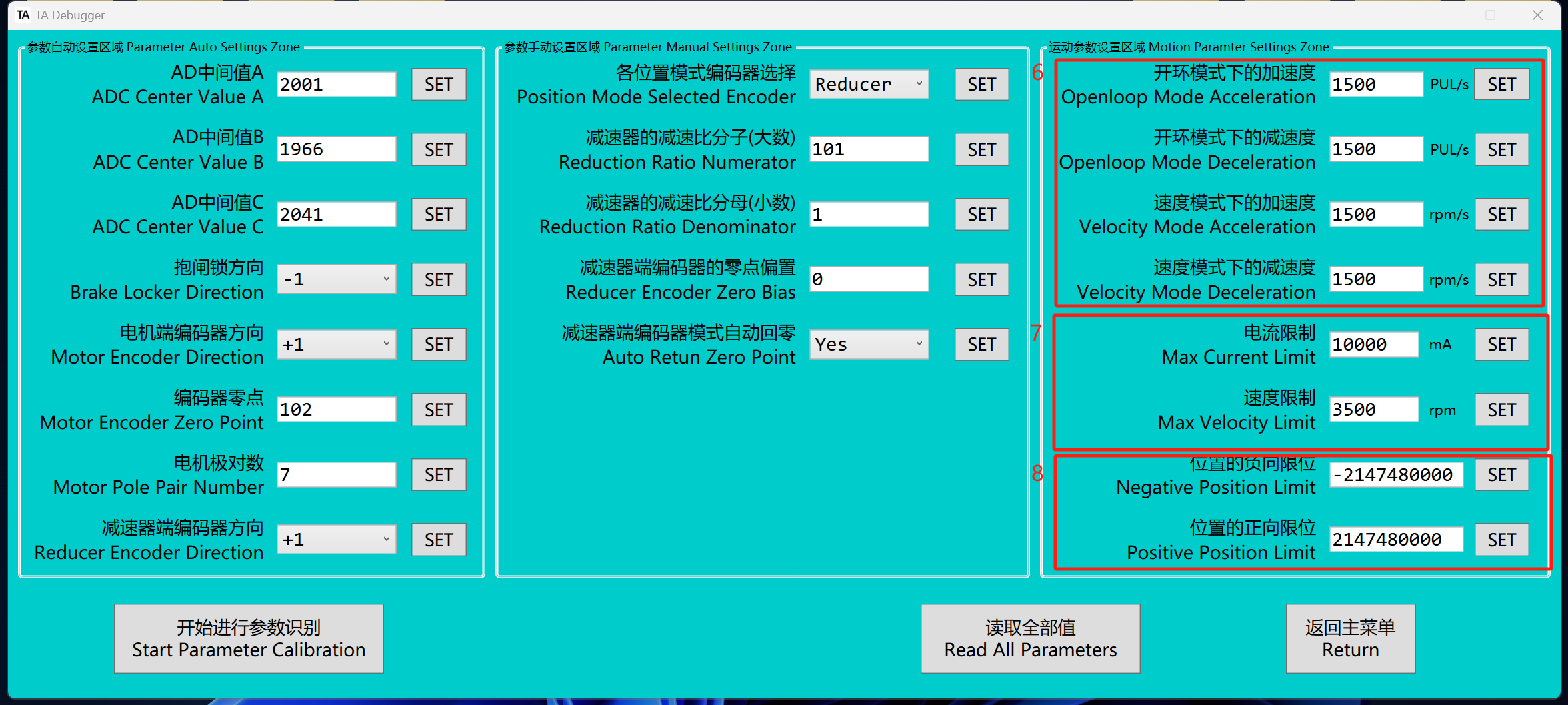
用户可修改开环模式和轮廓速度模式下的加减速参数,修改值存储于Flash中。同时,支持在开环模式或轮廓速度模式下实时调整加减速参数,实时调整的参数存储于RAM中。有关实时修改加减速的指令,请参见CAN2.0B 通信协议。
✅上电时,若未写入RAM,则调用Flash中的值;若已写入RAM,则调用RAM中的值。
🍞其中“速度模式下的加(减)速度”也适用于轮廓位置模式和位置模式
-
电流限制仅在MIT模式下起作用,电流限制影响了非堵转下的加速度和堵转下的扭矩。速度限制值限制了轮廓速度,轮廓位置,位置模式的最高转速。
-
用户可以根据编码器的选择设置电机或减速器端的正负限位,该限位在轮廓位置模式和位置模式中有效,设置该参数后执行器将不会超过该位置值
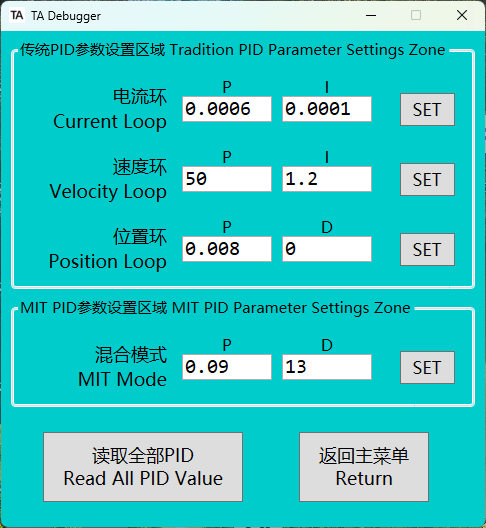
PID参数设置
- 用户可在此界面单次设置各类PID参数,参数值存储于Flash中。同时支持实时设置PID参数,实时设置的参数存储于RAM中。具体设置方法请参见下文“CAN帧介绍”。
✅
上电后不写入ram,则会调用flash的值,若写入ram,则会调用ram的值。
保护参数设置 Protection Parameter Settings
用户可设置各类电机保护参数,但通常无需调整,这些参数已在出厂前设置完毕。当然,用户也可以根据实际使用场景对保护参数进行修改。
